|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
File logger for Linux based autopilots. More...
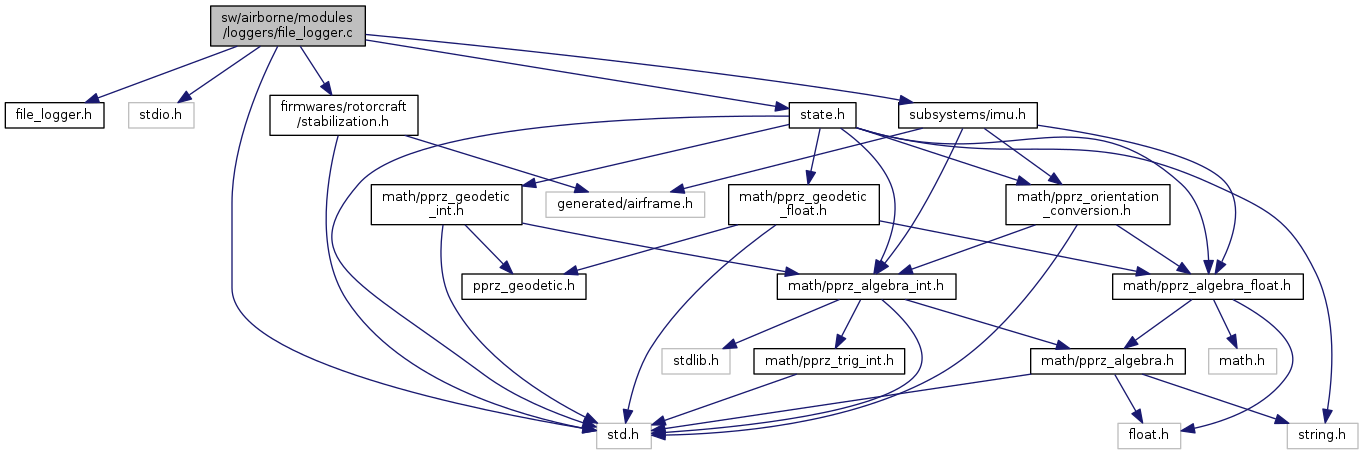
#include "file_logger.h"#include <stdio.h>#include "std.h"#include "subsystems/imu.h"#include "firmwares/rotorcraft/stabilization.h"#include "state.h" Include dependency graph for file_logger.c:
Include dependency graph for file_logger.c:Go to the source code of this file.
Macros | |
| #define | FILE_LOGGER_PATH /data/video/usb |
| Set the default File logger path to the USB drive. More... | |
Functions | |
| void | file_logger_start (void) |
| Start the file logger and open a new file. More... | |
| void | file_logger_stop (void) |
| Stop the logger an nicely close the file. More... | |
| void | file_logger_periodic (void) |
| Log the values to a csv file. More... | |
Variables | |
| static FILE * | file_logger = NULL |
| The file pointer. More... | |
File logger for Linux based autopilots.
Definition in file file_logger.c.
| #define FILE_LOGGER_PATH /data/video/usb |
Set the default File logger path to the USB drive.
Definition at line 38 of file file_logger.c.
Referenced by file_logger_start().
| void file_logger_periodic | ( | void | ) |
Log the values to a csv file.
Definition at line 79 of file file_logger.c.
References Imu::accel_unscaled, counter, file_logger, Imu::gyro_unscaled, imu, Imu::mag_unscaled, Int32Rates::p, Int32Rates::q, Int32Quat::qi, Int32Quat::qx, Int32Quat::qy, Int32Quat::qz, Int32Rates::r, stabilization_cmd, stateGetNedToBodyQuat_i(), Int32Vect3::x, Int32Vect3::y, and Int32Vect3::z.
Here is the call graph for this function:| void file_logger_start | ( | void | ) |
Start the file logger and open a new file.
Definition at line 45 of file file_logger.c.
References counter, file_logger, and FILE_LOGGER_PATH.
| void file_logger_stop | ( | void | ) |
Stop the logger an nicely close the file.
Definition at line 70 of file file_logger.c.
References file_logger.
|
static |
The file pointer.
Definition at line 42 of file file_logger.c.
Referenced by file_logger_periodic(), file_logger_start(), and file_logger_stop().
 1.8.8
1.8.8