|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
Actuator driver for ardrone2 version. More...
#include "subsystems/actuators.h"#include "actuators.h"#include "mcu_periph/gpio.h"#include "led_hw.h"#include "mcu_periph/sys_time.h"#include "navdata.h"#include <stdio.h>#include <string.h>#include <unistd.h>#include <fcntl.h>#include <errno.h>#include <termios.h>#include <stdint.h>#include "autopilot.h" Include dependency graph for actuators.c:
Include dependency graph for actuators.c:Go to the source code of this file.
Macros | |
| #define | ARDRONE_GPIO_PORT 0x32524 |
| #define | ARDRONE_GPIO_PIN_MOTOR1 171 |
| #define | ARDRONE_GPIO_PIN_MOTOR2 172 |
| #define | ARDRONE_GPIO_PIN_MOTOR3 173 |
| #define | ARDRONE_GPIO_PIN_MOTOR4 174 |
| #define | ARDRONE_GPIO_PIN_IRQ_FLIPFLOP 175 |
| #define | ARDRONE_GPIO_PIN_IRQ_INPUT 176 |
| #define | BIT_NUMBER(VAL, BIT) (((VAL)>>BIT)&0x03) |
Functions | |
| static void | actuators_ardrone_reset_flipflop (void) |
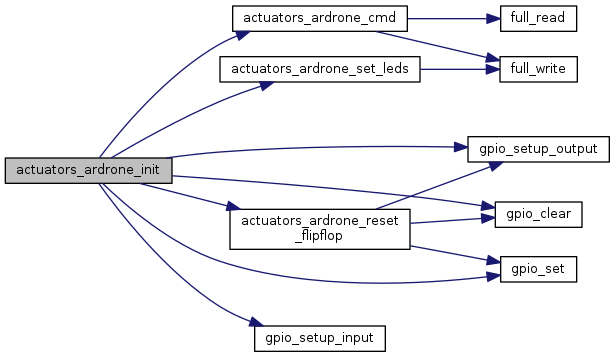
| void | actuators_ardrone_init (void) |
| int | actuators_ardrone_cmd (uint8_t cmd, uint8_t *reply, int replylen) |
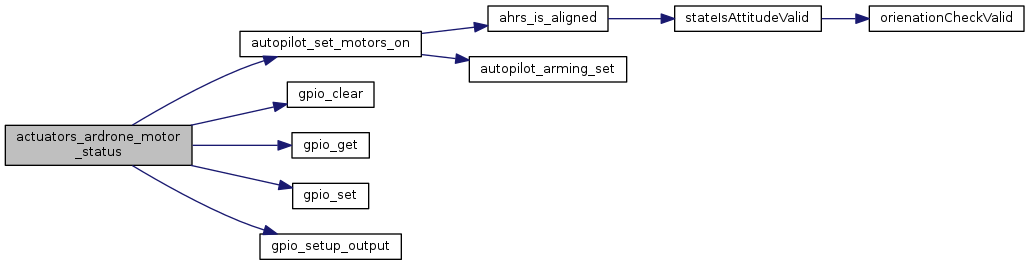
| void | actuators_ardrone_motor_status (void) |
| void | actuators_ardrone_led_run (void) |
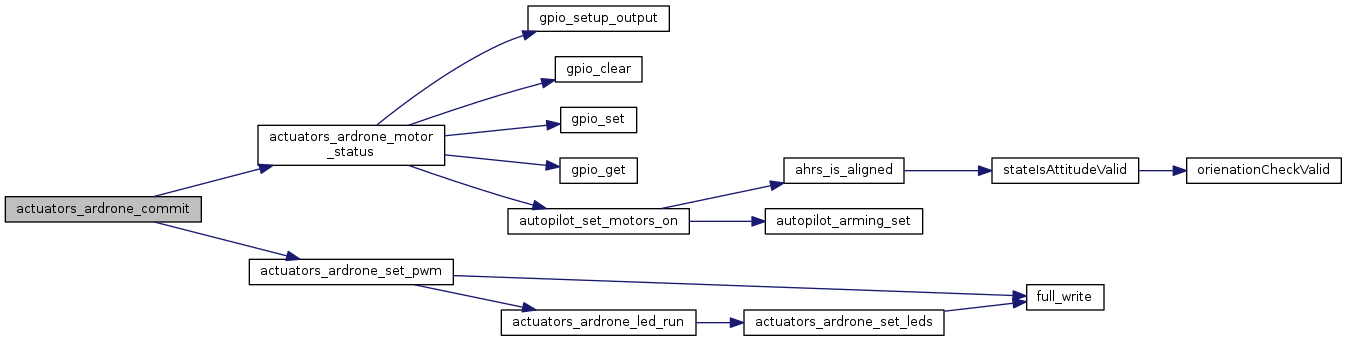
| void | actuators_ardrone_commit (void) |
| void | actuators_ardrone_set_pwm (uint16_t pwm0, uint16_t pwm1, uint16_t pwm2, uint16_t pwm3) |
| Write motor speed command cmd = 001aaaaa aaaabbbb bbbbbccc ccccccdd ddddddd0. More... | |
| void | actuators_ardrone_set_leds (uint8_t led0, uint8_t led1, uint8_t led2, uint8_t led3) |
| Write LED command cmd = 011rrrr0 000gggg0 (this is ardrone1 format, we need ardrone2 format) More... | |
| void | actuators_ardrone_close (void) |
Variables | |
| int | actuator_ardrone2_fd |
| Power consumption @ 11V all 4 motors running PWM A 0 0.2 80 1.3 100 1.5 150 2.0 190 2.5 130 3.0. More... | |
| uint32_t | led_hw_values |
Actuator driver for ardrone2 version.
Definition in file actuators.c.
| #define ARDRONE_GPIO_PIN_IRQ_FLIPFLOP 175 |
Definition at line 65 of file actuators.c.
Referenced by actuators_ardrone_init(), actuators_ardrone_motor_status(), and actuators_ardrone_reset_flipflop().
| #define ARDRONE_GPIO_PIN_IRQ_INPUT 176 |
Definition at line 66 of file actuators.c.
Referenced by actuators_ardrone_init(), and actuators_ardrone_motor_status().
| #define ARDRONE_GPIO_PIN_MOTOR1 171 |
Definition at line 60 of file actuators.c.
Referenced by actuators_ardrone_init().
| #define ARDRONE_GPIO_PIN_MOTOR2 172 |
Definition at line 61 of file actuators.c.
Referenced by actuators_ardrone_init().
| #define ARDRONE_GPIO_PIN_MOTOR3 173 |
Definition at line 62 of file actuators.c.
Referenced by actuators_ardrone_init().
| #define ARDRONE_GPIO_PIN_MOTOR4 174 |
Definition at line 63 of file actuators.c.
Referenced by actuators_ardrone_init().
| #define ARDRONE_GPIO_PORT 0x32524 |
Definition at line 58 of file actuators.c.
Referenced by actuators_ardrone_init(), actuators_ardrone_motor_status(), actuators_ardrone_reset_flipflop(), mag_freeze_check(), and navdata_init().
| #define BIT_NUMBER | ( | VAL, | |
| BIT | |||
| ) | (((VAL)>>BIT)&0x03) |
Definition at line 207 of file actuators.c.
Referenced by actuators_ardrone_led_run().
| void actuators_ardrone_close | ( | void | ) |
Definition at line 271 of file actuators.c.
References actuator_ardrone2_fd.
Definition at line 158 of file actuators.c.
References actuator_ardrone2_fd, full_read(), and full_write().
Referenced by actuators_ardrone_init().
Here is the call graph for this function: Here is the caller graph for this function:| void actuators_ardrone_commit | ( | void | ) |
Definition at line 220 of file actuators.c.
References actuators_ardrone_motor_status(), actuators_ardrone_set_pwm(), and actuators_pwm_values.
Here is the call graph for this function:| void actuators_ardrone_init | ( | void | ) |
Definition at line 81 of file actuators.c.
References actuator_ardrone2_fd, actuators_ardrone_cmd(), actuators_ardrone_reset_flipflop(), actuators_ardrone_set_leds(), ARDRONE_GPIO_PIN_IRQ_FLIPFLOP, ARDRONE_GPIO_PIN_IRQ_INPUT, ARDRONE_GPIO_PIN_MOTOR1, ARDRONE_GPIO_PIN_MOTOR2, ARDRONE_GPIO_PIN_MOTOR3, ARDRONE_GPIO_PIN_MOTOR4, ARDRONE_GPIO_PORT, B115200, gpio_clear(), gpio_set(), gpio_setup_input(), gpio_setup_output(), led_hw_values, MOT_LEDGREEN, and MOT_LEDRED.
Here is the call graph for this function:| void actuators_ardrone_led_run | ( | void | ) |
Definition at line 210 of file actuators.c.
References actuators_ardrone_set_leds(), BIT_NUMBER, and led_hw_values.
Referenced by actuators_ardrone_set_pwm().
Here is the call graph for this function: Here is the caller graph for this function:| void actuators_ardrone_motor_status | ( | void | ) |
Definition at line 170 of file actuators.c.
References ARDRONE_GPIO_PIN_IRQ_FLIPFLOP, ARDRONE_GPIO_PIN_IRQ_INPUT, ARDRONE_GPIO_PORT, autopilot_motors_on, autopilot_set_motors_on(), FALSE, gpio_clear(), gpio_get(), gpio_set(), and gpio_setup_output().
Referenced by actuators_ardrone_commit().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Definition at line 70 of file actuators.c.
References ARDRONE_GPIO_PIN_IRQ_FLIPFLOP, ARDRONE_GPIO_PORT, gpio_clear(), gpio_set(), gpio_setup_output(), and sys_time::nb_sec.
Referenced by actuators_ardrone_init().
Here is the call graph for this function: Here is the caller graph for this function:Write LED command cmd = 011rrrr0 000gggg0 (this is ardrone1 format, we need ardrone2 format)
led0 = RearLeft led1 = RearRight led2 = FrontRight led3 = FrontLeft
Definition at line 254 of file actuators.c.
References actuator_ardrone2_fd, and full_write().
Referenced by actuators_ardrone_init(), and actuators_ardrone_led_run().
Here is the call graph for this function: Here is the caller graph for this function:Write motor speed command cmd = 001aaaaa aaaabbbb bbbbbccc ccccccdd ddddddd0.
Definition at line 231 of file actuators.c.
References actuator_ardrone2_fd, actuators_ardrone_led_run(), and full_write().
Referenced by actuators_ardrone_commit().
Here is the call graph for this function: Here is the caller graph for this function:| int actuator_ardrone2_fd |
Power consumption @ 11V all 4 motors running PWM A 0 0.2 80 1.3 100 1.5 150 2.0 190 2.5 130 3.0.
File descriptor for the port
Definition at line 56 of file actuators.c.
Referenced by actuators_ardrone_close(), actuators_ardrone_cmd(), actuators_ardrone_init(), actuators_ardrone_set_leds(), and actuators_ardrone_set_pwm().
| uint32_t led_hw_values |
Definition at line 68 of file actuators.c.
Referenced by actuators_ardrone_init(), actuators_ardrone_led_run(), and actuators_bebop_commit().
 1.8.8
1.8.8