|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
#include "std.h" Include dependency graph for sonar_pwm.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for sonar_pwm.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | SonarPwm |
Functions | |
| void | sonar_pwm_init (void) |
| void | sonar_pwm_read (void) |
Variables | |
| struct SonarPwm | sonar_pwm |
| struct SonarPwm |
Definition at line 42 of file sonar_pwm.h.
| Data Fields | ||
|---|---|---|
| float | distance | Distance measured. |
| float | offset | offset |
| uint16_t | raw | raw PWM value |
| float | scale | scale to convert raw to a real distance |
| void sonar_pwm_init | ( | void | ) |
Definition at line 109 of file sonar_pwm.c.
References init_median_filter_f(), SonarPwm::offset, SonarPwm::raw, SonarPwm::scale, sonar_filt, SONAR_MEDIAN_SIZE, SONAR_OFFSET, sonar_pwm, and SONAR_SCALE.
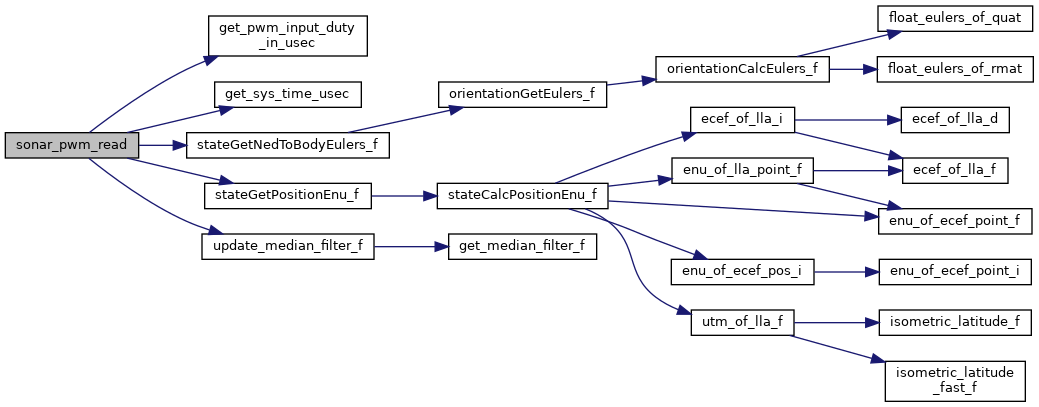
Here is the call graph for this function:| void sonar_pwm_read | ( | void | ) |
Definition at line 120 of file sonar_pwm.c.
References AGL_SONAR_PWM_ID, DefaultChannel, DefaultDevice, SonarAdc::distance, SonarPwm::distance, get_pwm_input_duty_in_usec(), get_sys_time_usec(), SonarPwm::offset, FloatEulers::phi, SonarPwm::raw, SonarPwm::scale, sonar_adc, sonar_filt, SONAR_MAX_RANGE, SONAR_MIN_RANGE, sonar_pwm, SONAR_PWM_OFFSET, stateGetNedToBodyEulers_f(), stateGetPositionEnu_f(), FloatEulers::theta, update_median_filter_f(), and EnuCoor_f::z.
Here is the call graph for this function:| struct SonarPwm sonar_pwm |
Definition at line 106 of file sonar_pwm.c.
Referenced by sonar_pwm_init(), and sonar_pwm_read().
 1.8.17
1.8.17