|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
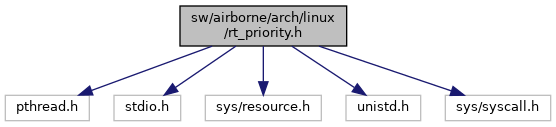
#include <pthread.h>#include <stdio.h>#include <sys/resource.h>#include <unistd.h>#include <sys/syscall.h> Include dependency graph for rt_priority.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for rt_priority.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| static int | get_rt_prio (int prio) |
| static int | set_nice_level (int level) |
Functions to obtain rt priority or set the nice level.
Definition in file rt_priority.h.
|
inlinestatic |
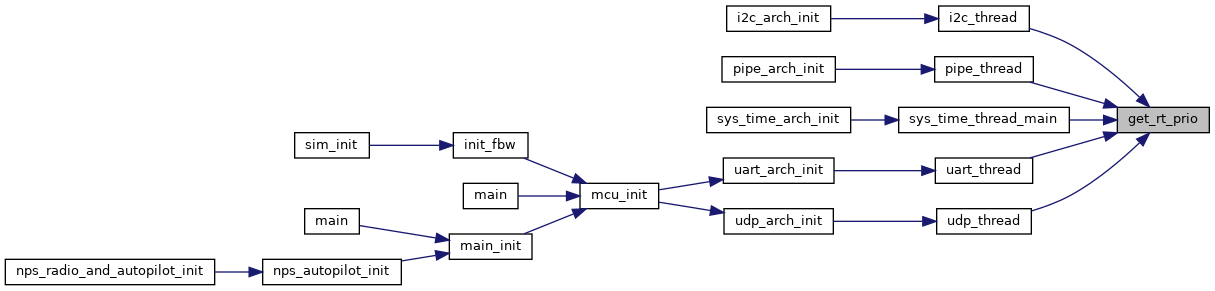
Definition at line 32 of file rt_priority.h.
Referenced by i2c_thread(), pipe_thread(), sys_time_thread_main(), uart_thread(), and udp_thread().
Here is the caller graph for this function:
|
inlinestatic |
Definition at line 69 of file rt_priority.h.
Referenced by cv_async_thread(), and video_thread_function().
Here is the caller graph for this function: 1.8.17
1.8.17