|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
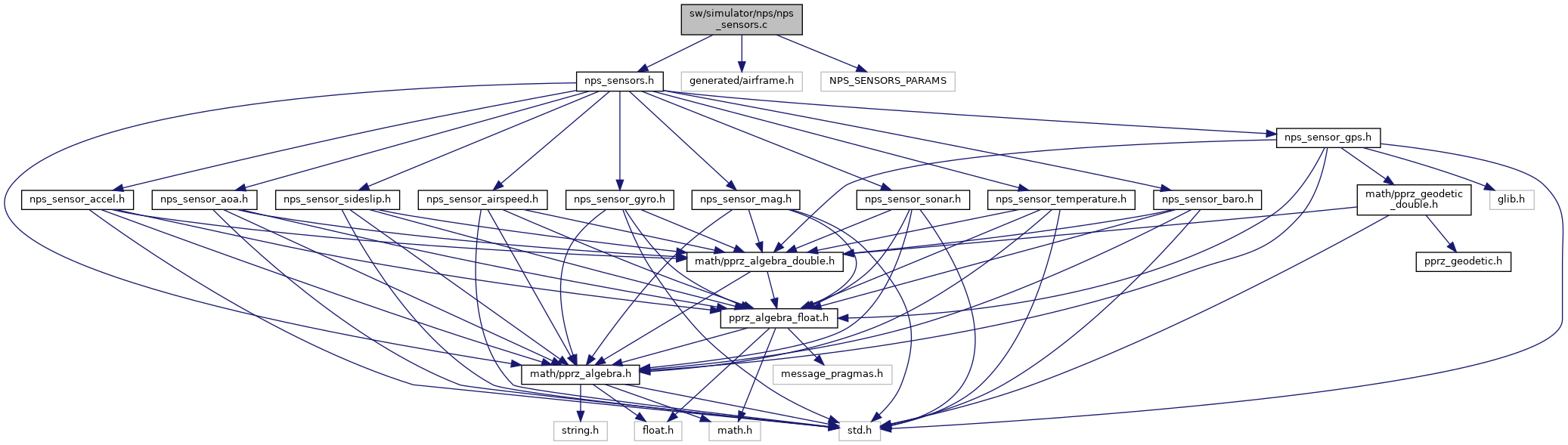
 Include dependency graph for nps_sensors.c:
Include dependency graph for nps_sensors.c:Go to the source code of this file.
Functions | |
| void | nps_sensors_init (double time) |
| void | nps_sensors_run_step (double time) |
| bool | nps_sensors_gyro_available (void) |
| bool | nps_sensors_mag_available (void) |
| bool | nps_sensors_baro_available (void) |
| bool | nps_sensors_gps_available (void) |
| bool | nps_sensors_sonar_available (void) |
| bool | nps_sensors_airspeed_available (void) |
| bool | nps_sensors_temperature_available (void) |
| bool | nps_sensors_aoa_available (void) |
| bool | nps_sensors_sideslip_available (void) |
Variables | |
| struct NpsSensors | sensors |
| bool nps_sensors_airspeed_available | ( | void | ) |
Definition at line 88 of file nps_sensors.c.
References NpsSensors::airspeed, NpsSensorAirspeed::data_available, FALSE, sensors, and TRUE.
Referenced by nps_autopilot_run_step().
Here is the caller graph for this function:| bool nps_sensors_aoa_available | ( | void | ) |
Definition at line 106 of file nps_sensors.c.
References NpsSensors::aoa, NpsSensorAngleOfAttack::data_available, FALSE, sensors, and TRUE.
Referenced by nps_autopilot_run_step().
Here is the caller graph for this function:| bool nps_sensors_baro_available | ( | void | ) |
Definition at line 61 of file nps_sensors.c.
References NpsSensors::baro, NpsSensorBaro::data_available, FALSE, sensors, and TRUE.
Referenced by nps_autopilot_run_step().
Here is the caller graph for this function:| bool nps_sensors_gps_available | ( | void | ) |
Definition at line 70 of file nps_sensors.c.
References NpsSensorGps::data_available, FALSE, NpsSensors::gps, sensors, and TRUE.
Referenced by nps_autopilot_run_step().
Here is the caller graph for this function:| bool nps_sensors_gyro_available | ( | void | ) |
Definition at line 43 of file nps_sensors.c.
References NpsSensorGyro::data_available, FALSE, NpsSensors::gyro, sensors, and TRUE.
Referenced by nps_autopilot_run_step().
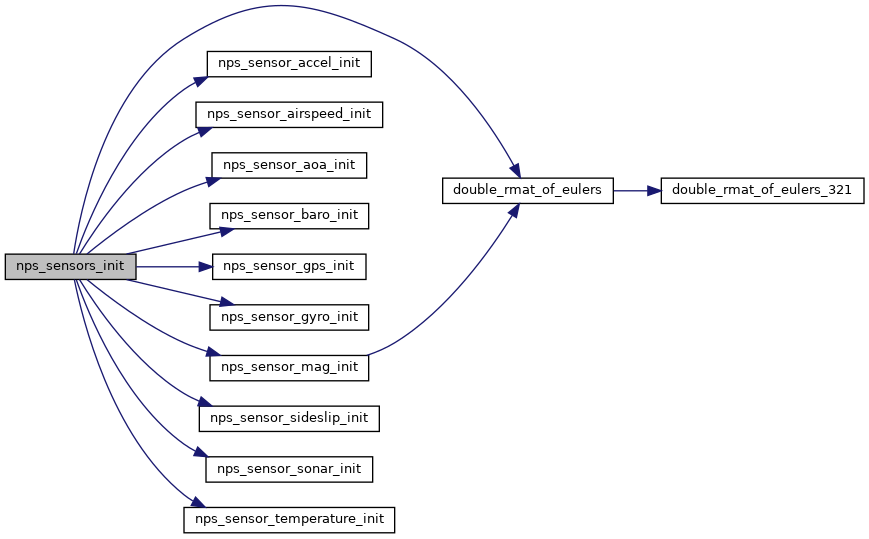
Here is the caller graph for this function:| void nps_sensors_init | ( | double | time | ) |
Definition at line 8 of file nps_sensors.c.
References NpsSensors::accel, NpsSensors::airspeed, NpsSensors::aoa, NpsSensors::baro, NpsSensors::body_to_imu_rmat, double_rmat_of_eulers(), NpsSensors::gps, NpsSensors::gyro, NpsSensors::mag, nps_sensor_accel_init(), nps_sensor_airspeed_init(), nps_sensor_aoa_init(), nps_sensor_baro_init(), nps_sensor_gps_init(), nps_sensor_gyro_init(), nps_sensor_mag_init(), nps_sensor_sideslip_init(), nps_sensor_sonar_init(), nps_sensor_temperature_init(), sensors, NpsSensors::sideslip, NpsSensors::sonar, and NpsSensors::temp.
Referenced by nps_main_init().
Here is the call graph for this function: Here is the caller graph for this function:| bool nps_sensors_mag_available | ( | void | ) |
Definition at line 52 of file nps_sensors.c.
References NpsSensorMag::data_available, FALSE, NpsSensors::mag, sensors, and TRUE.
Referenced by nps_autopilot_run_step().
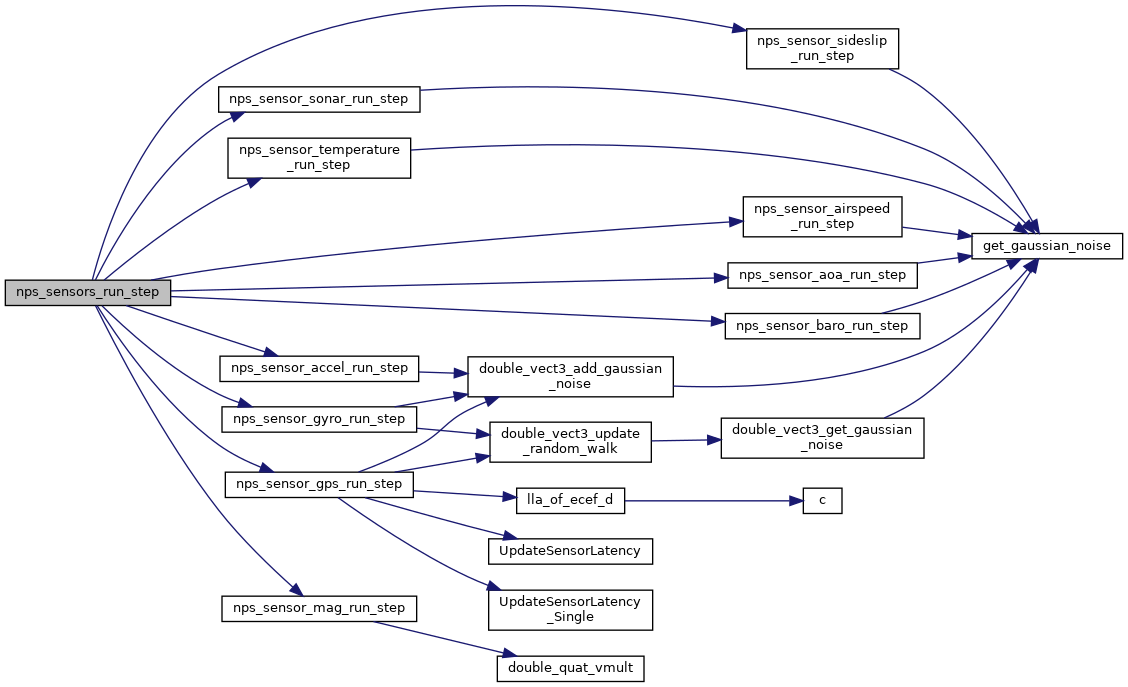
Here is the caller graph for this function:| void nps_sensors_run_step | ( | double | time | ) |
Definition at line 28 of file nps_sensors.c.
References NpsSensors::accel, NpsSensors::airspeed, NpsSensors::aoa, NpsSensors::baro, NpsSensors::body_to_imu_rmat, NpsSensors::gps, NpsSensors::gyro, NpsSensors::mag, nps_sensor_accel_run_step(), nps_sensor_airspeed_run_step(), nps_sensor_aoa_run_step(), nps_sensor_baro_run_step(), nps_sensor_gps_run_step(), nps_sensor_gyro_run_step(), nps_sensor_mag_run_step(), nps_sensor_sideslip_run_step(), nps_sensor_sonar_run_step(), nps_sensor_temperature_run_step(), sensors, NpsSensors::sideslip, NpsSensors::sonar, and NpsSensors::temp.
Referenced by nps_main_run_sim_step().
Here is the call graph for this function: Here is the caller graph for this function:| bool nps_sensors_sideslip_available | ( | void | ) |
Definition at line 115 of file nps_sensors.c.
References NpsSensorSideSlip::data_available, FALSE, sensors, NpsSensors::sideslip, and TRUE.
Referenced by nps_autopilot_run_step().
Here is the caller graph for this function:| bool nps_sensors_sonar_available | ( | void | ) |
Definition at line 79 of file nps_sensors.c.
References NpsSensorSonar::data_available, FALSE, sensors, NpsSensors::sonar, and TRUE.
Referenced by nps_autopilot_run_step().
Here is the caller graph for this function:| bool nps_sensors_temperature_available | ( | void | ) |
Definition at line 97 of file nps_sensors.c.
References NpsSensorTemperature::data_available, FALSE, sensors, NpsSensors::temp, and TRUE.
Referenced by nps_autopilot_run_step().
Here is the caller graph for this function:| struct NpsSensors sensors |
Definition at line 6 of file nps_sensors.c.
Referenced by nps_sensors_airspeed_available(), nps_sensors_aoa_available(), nps_sensors_baro_available(), nps_sensors_gps_available(), nps_sensors_gyro_available(), nps_sensors_init(), nps_sensors_mag_available(), nps_sensors_run_step(), nps_sensors_sideslip_available(), nps_sensors_sonar_available(), and nps_sensors_temperature_available().
 1.8.17
1.8.17