|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
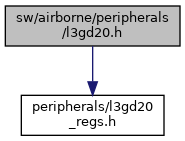
#include "peripherals/l3gd20_regs.h" Include dependency graph for l3gd20.h: This graph shows which files directly or indirectly include this file:
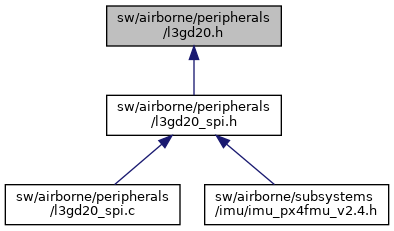
Include dependency graph for l3gd20.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | L3gd20Config |
Enumerations | |
| enum | L3gd20ConfStatus { L3G_CONF_UNINIT = 0, L3G_CONF_WHO_AM_I = 1, L3G_CONF_WHO_AM_I_OK = 2, L3G_CONF_REG4 = 3, L3G_CONF_ENABLE = 4, L3G_CONF_DONE = 5 } |
Functions | |
| static void | l3gd20_set_default_config (struct L3gd20Config *c) |
ST L3GD20 3-axis gyroscope driver common interface (I2C and SPI).
Definition in file l3gd20.h.
| struct L3gd20Config |
| Data Fields | ||
|---|---|---|
| enum L3gd20DRBW | drbw | Data rate and bandwidth. |
| enum L3gd20FullScale | full_scale | gyro full scale |
| bool | spi_3_wire | Set 3-wire SPI mode, if FALSE: 4-wire SPI mode. |
| enum L3gd20ConfStatus |
|
inlinestatic |
Definition at line 50 of file l3gd20.h.
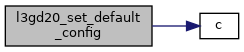
References c(), L3GD20_DRBW_760Hz_100BW, and L3GD20_FS_2000dps2.
Referenced by l3gd20_spi_init().
Here is the call graph for this function: Here is the caller graph for this function: 1.8.17
1.8.17