|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
#include "modules/guidance/gvf/gvf.h" Include dependency graph for gvf_line.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for gvf_line.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | gvf_li_par |
| struct | gvf_seg_par |
Functions | |
| void | gvf_line_info (float *phi, struct gvf_grad *, struct gvf_Hess *) |
Variables | |
| gvf_li_par | gvf_line_par |
| gvf_seg_par | gvf_segment_par |
Guidance algorithm based on vector fields 2D straight line trajectory
Definition in file gvf_line.h.
| struct gvf_li_par |
Definition at line 40 of file gvf_line.h.
| Data Fields | ||
|---|---|---|
| float | heading | |
| float | ke | |
| float | kn | |
| struct gvf_seg_par |
Definition at line 51 of file gvf_line.h.
| Data Fields | ||
|---|---|---|
| float | d1 | |
| float | d2 | |
Definition at line 62 of file gvf_line.c.
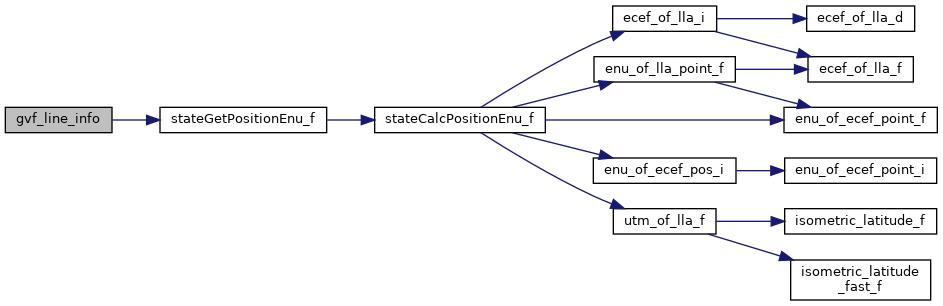
References alpha, b, gvf_trajectory, gvf_Hess::H11, gvf_Hess::H12, gvf_Hess::H21, gvf_Hess::H22, gvf_grad::nx, gvf_grad::ny, gvf_tra::p, p, and stateGetPositionEnu_f().
Referenced by gvf_line().
Here is the call graph for this function: Here is the caller graph for this function:| gvf_li_par gvf_line_par |
Definition at line 59 of file gvf_line.c.
Referenced by gvf_line().
| gvf_seg_par gvf_segment_par |
Definition at line 60 of file gvf_line.c.
 1.8.17
1.8.17