|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
#include "std.h" Include dependency graph for cv_target_localization.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for cv_target_localization.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| void | target_localization_init (void) |
| void | target_localization_report (void) |
| void | cv_target_localization_report_mark (uint8_t mark) |
Variables | |
| uint8_t | target_localization_mark |
| bool | target_localization_update_wp |
Compute georeferenced position of a target from visual detection assuming that the target is on a flat ground
Definition in file cv_target_localization.h.
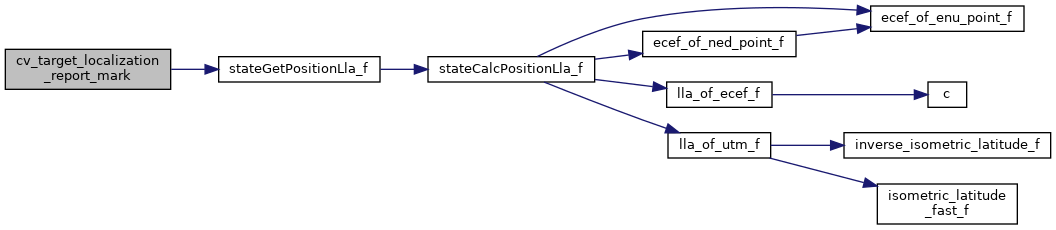
| void cv_target_localization_report_mark | ( | uint8_t | mark | ) |
Definition at line 232 of file cv_target_localization.c.
References DefaultChannel, DefaultDevice, LlaCoor_f::lat, LlaCoor_f::lon, stateGetPositionLla_f(), and target_localization_mark.
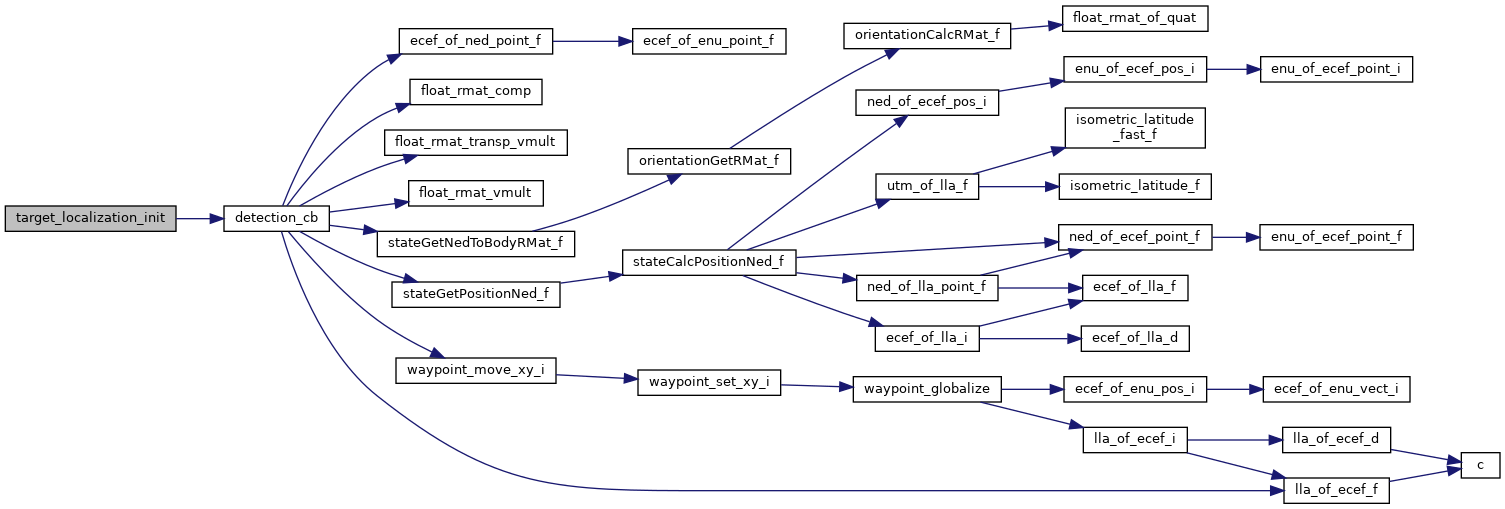
Here is the call graph for this function:| void target_localization_init | ( | void | ) |
Definition at line 190 of file cv_target_localization.c.
References target_loc_t::body_to_cam, target_loc_t::cam_pos, detection_cb(), detection_ev, float_rmat_of_eulers, FLOAT_VECT3_ZERO, target_loc_t::px, target_loc_t::py, target_loc_t::target, target_loc, TARGET_LOC_BODY_TO_CAM_PHI, TARGET_LOC_BODY_TO_CAM_PSI, TARGET_LOC_BODY_TO_CAM_THETA, TARGET_LOC_CAM_POS_X, TARGET_LOC_CAM_POS_Y, TARGET_LOC_CAM_POS_Z, TARGET_LOC_ID, target_localization_mark, target_localization_update_wp, target_loc_t::valid, and VECT3_ASSIGN.
Here is the call graph for this function:| void target_localization_report | ( | void | ) |
Definition at line 218 of file cv_target_localization.c.
References DefaultChannel, DefaultDevice, LlaCoor_f::lat, LlaCoor_f::lon, target_loc_t::pos_lla, target_loc, target_loc_t::type, and target_loc_t::valid.
| uint8_t target_localization_mark |
Definition at line 99 of file cv_target_localization.c.
Referenced by cv_target_localization_report_mark(), and target_localization_init().
| bool target_localization_update_wp |
Definition at line 101 of file cv_target_localization.c.
Referenced by detection_cb(), and target_localization_init().
 1.8.17
1.8.17