#include "std.h"
#include "peripherals/video_device.h"
Go to the source code of this file.
◆ ActuatorDefaultSet
◆ ActuatorsDefaultCommit
◆ ActuatorsDefaultInit
◆ BOARD_BEBOP
◆ DEFAULT_ACTUATORS
◆ GPS_UBX_ENABLE_NMEA_DATA_MASK
| #define GPS_UBX_ENABLE_NMEA_DATA_MASK 0xff |
◆ SPI0_BITS_PER_WORD
| #define SPI0_BITS_PER_WORD 8 |
◆ SPI0_MAX_SPEED_HZ
| #define SPI0_MAX_SPEED_HZ 320000 |
◆ SPI0_MODE
◆ UART1_DEV
| #define UART1_DEV /dev/ttyPA1 |
uart connected to GPS internally
Definition at line 32 of file bebop.h.
◆ UART2_DEV
| #define UART2_DEV /dev/ttyUSB0 |
For using serial devices via USB to serial converter electronics E.g.
a XBee modem, a 3DR radio modem, Serial Stereocam etc. etc.
Definition at line 40 of file bebop.h.
◆ UART4_DEV
| #define UART4_DEV /dev/ttyUSB1 |
◆ UART5_DEV
| #define UART5_DEV /dev/ttyACM0 |
◆ UART6_DEV
| #define UART6_DEV /dev/ttyACM1 |
◆ USE_BARO_BOARD
◆ bottom_camera
◆ front_camera
Video thread dummy for simulation.
- Keeps track of added devices, which can be referenced by simulation code such as in simulator/nps/fdm_gazebo.c.
Definition at line 43 of file board.c.
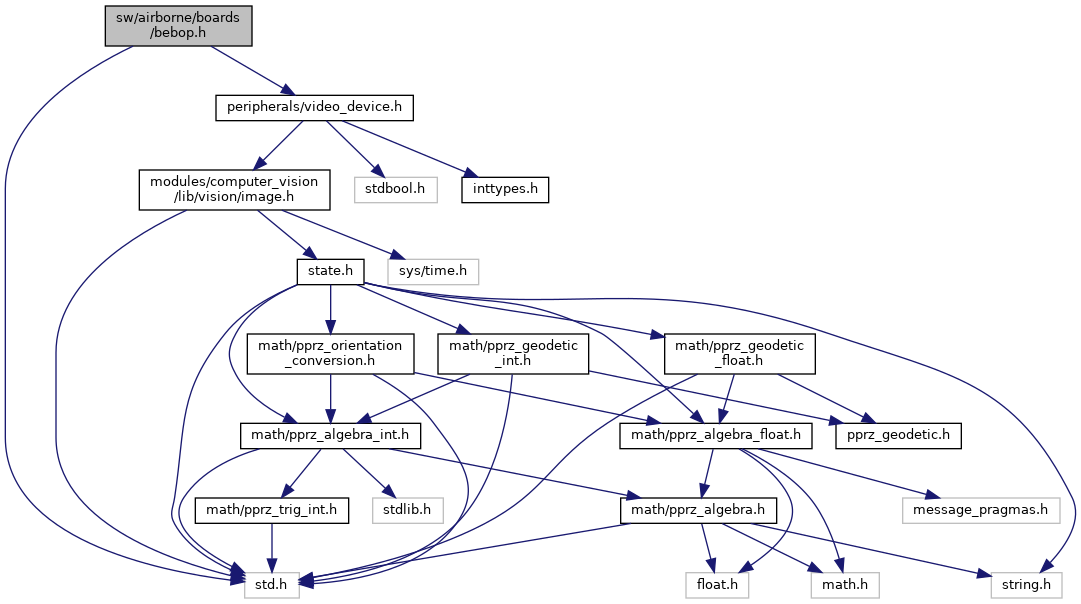
 Include dependency graph for bebop.h:
Include dependency graph for bebop.h: 1.8.17
1.8.17