|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
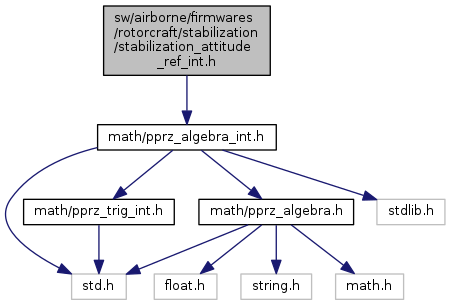
Rotorcraft attitude reference generation API. More...
#include "math/pprz_algebra_int.h" Include dependency graph for stabilization_attitude_ref_int.h: This graph shows which files directly or indirectly include this file:
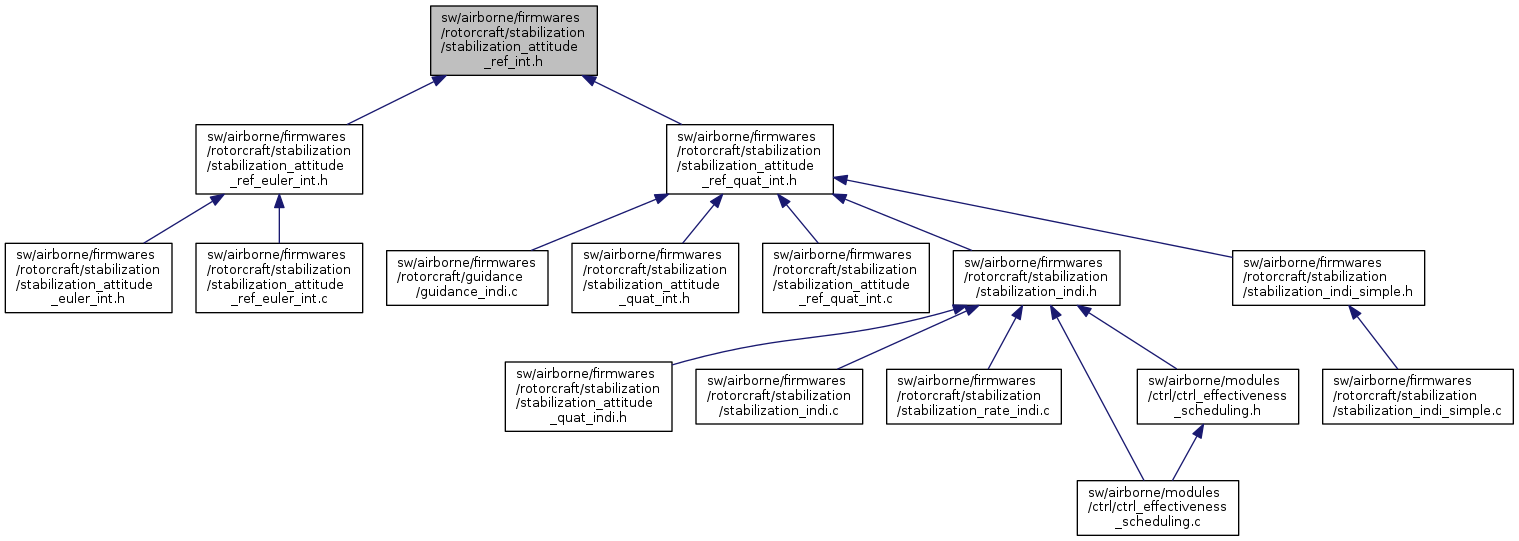
Include dependency graph for stabilization_attitude_ref_int.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | REF_ACCEL_FRAC 12 |
| #define | REF_RATE_FRAC 16 |
| #define | REF_ANGLE_FRAC 20 |
Rotorcraft attitude reference generation API.
Common to all fixed-point reference generators (euler and quaternion)
Definition in file stabilization_attitude_ref_int.h.
| #define REF_ACCEL_FRAC 12 |
Definition at line 32 of file stabilization_attitude_ref_int.h.
Referenced by attitude_ref_euler_int_update(), attitude_ref_quat_int_set_max_pdot(), attitude_ref_quat_int_set_max_qdot(), attitude_ref_quat_int_set_max_rdot(), and attitude_ref_quat_int_update().
| #define REF_ANGLE_FRAC 20 |
Definition at line 34 of file stabilization_attitude_ref_int.h.
Referenced by attitude_ref_euler_int_update(), reset_psi_ref_from_body(), send_att_ref(), and stabilization_attitude_run().
| #define REF_RATE_FRAC 16 |
Definition at line 33 of file stabilization_attitude_ref_int.h.
Referenced by attitude_ref_euler_int_update(), attitude_ref_quat_int_set_max_p(), attitude_ref_quat_int_set_max_q(), attitude_ref_quat_int_set_max_r(), attitude_ref_quat_int_update(), and stabilization_attitude_run().
 1.8.8
1.8.8