|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
Vertical control for fixed wing vehicles. More...
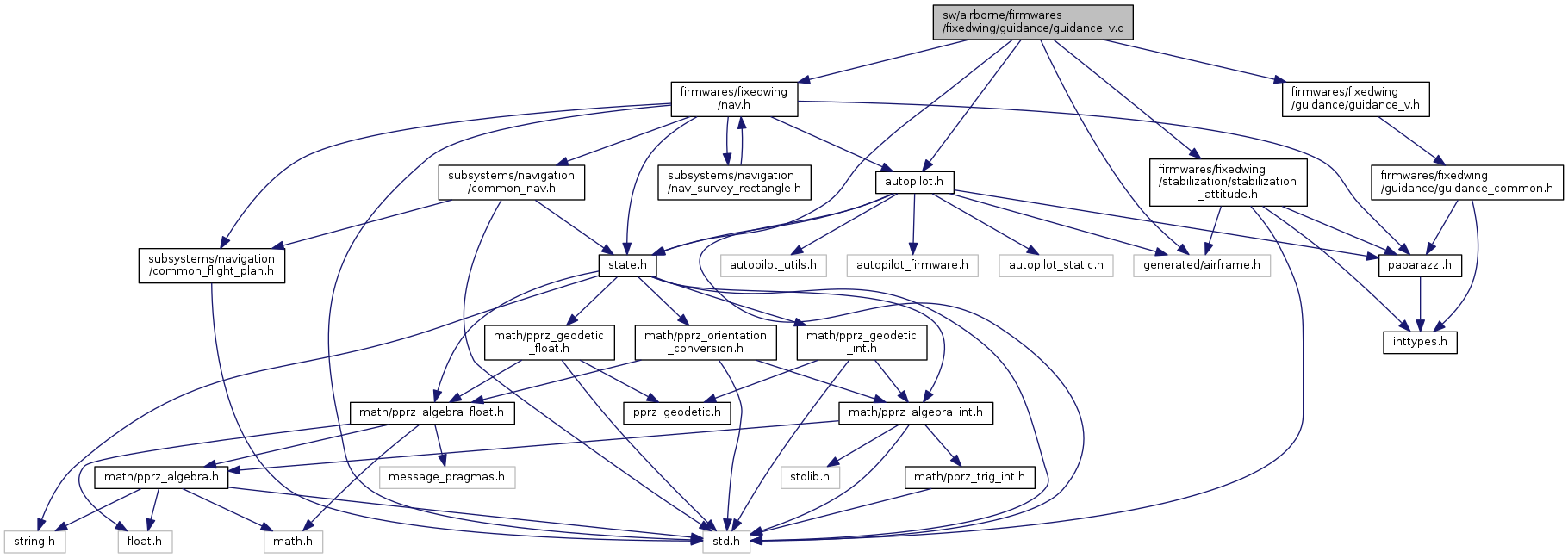
#include "firmwares/fixedwing/guidance/guidance_v.h"#include "state.h"#include "firmwares/fixedwing/nav.h"#include "generated/airframe.h"#include "autopilot.h"#include "firmwares/fixedwing/stabilization/stabilization_attitude.h" Include dependency graph for guidance_v.c:
Include dependency graph for guidance_v.c:Go to the source code of this file.
Macros | |
| #define | V_CTL_AUTO_THROTTLE_DGAIN 0. |
| #define | V_CTL_AUTO_THROTTLE_MAX_SUM_ERR 150 |
| #define | V_CTL_AUTO_THROTTLE_PITCH_OF_VZ_DGAIN 0. |
| #define | V_CTL_AUTO_PITCH_MAX_SUM_ERR 100 |
| #define | V_CTL_PITCH_TRIM 0. |
| #define | V_CTL_ALTITUDE_PRE_CLIMB_CORRECTION 1.0f |
| #define | V_CTL_THROTTLE_SLEW 1. |
| auto pitch inner loop More... | |
Functions | |
| static void | v_ctl_climb_auto_throttle_loop (void) |
| auto throttle inner loop More... | |
| void | v_ctl_init (void) |
| void | v_ctl_guidance_loop (void) |
| General guidance logic This will call the proper control loops according to the sub-modes. More... | |
| void | v_ctl_altitude_loop (void) |
| outer loop More... | |
| void | v_ctl_climb_loop (void) |
| Auto-throttle inner loop. More... | |
| void | v_ctl_landing_loop (void) |
| void | v_ctl_throttle_slew (void) |
| Computes slewed throttle from throttle setpoint called at 20Hz. More... | |
Vertical control for fixed wing vehicles.
Definition in file guidance_v.c.
| #define V_CTL_ALTITUDE_PRE_CLIMB_CORRECTION 1.0f |
Definition at line 119 of file guidance_v.c.
Referenced by v_ctl_init().
| #define V_CTL_AUTO_PITCH_MAX_SUM_ERR 100 |
Definition at line 87 of file guidance_v.c.
| #define V_CTL_AUTO_THROTTLE_DGAIN 0. |
Definition at line 52 of file guidance_v.c.
Referenced by v_ctl_init().
| #define V_CTL_AUTO_THROTTLE_MAX_SUM_ERR 150 |
Definition at line 65 of file guidance_v.c.
Referenced by v_ctl_climb_auto_throttle_loop().
| #define V_CTL_AUTO_THROTTLE_PITCH_OF_VZ_DGAIN 0. |
Definition at line 70 of file guidance_v.c.
Referenced by v_ctl_init().
| #define V_CTL_PITCH_TRIM 0. |
Definition at line 93 of file guidance_v.c.
Referenced by v_ctl_init().
| #define V_CTL_THROTTLE_SLEW 1. |
auto pitch inner loop
computes a v_ctl_pitch_setpoint from a climb_setpoint given a fixed throttle
Definition at line 548 of file guidance_v.c.
Referenced by v_ctl_throttle_slew().
| void v_ctl_altitude_loop | ( | void | ) |
outer loop
Computes v_ctl_climb_setpoint and sets v_ctl_auto_throttle_submode
Definition at line 308 of file guidance_v.c.
References UtmCoor_f::alt, stateGetPositionUtm_f(), v_ctl_altitude_error, v_ctl_altitude_max_climb, v_ctl_altitude_pgain, v_ctl_altitude_pre_climb, v_ctl_altitude_pre_climb_correction, v_ctl_altitude_setpoint, V_CTL_AUTO_THROTTLE_AGRESSIVE, V_CTL_AUTO_THROTTLE_BLENDED, V_CTL_AUTO_THROTTLE_STANDARD, v_ctl_auto_throttle_submode, v_ctl_climb_mode, V_CTL_CLIMB_MODE_AUTO_THROTTLE, and v_ctl_climb_setpoint.
Referenced by v_ctl_guidance_loop().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
auto throttle inner loop
Definition at line 409 of file guidance_v.c.
References controlled_throttle, MAX_PPRZ, nav_pitch, stateGetSpeedEnu_f(), TRIM_UPPRZ, v_ctl_altitude_error, V_CTL_AUTO_THROTTLE_AGRESSIVE, V_CTL_AUTO_THROTTLE_BLENDED, v_ctl_auto_throttle_climb_throttle_increment, v_ctl_auto_throttle_cruise_throttle, v_ctl_auto_throttle_dgain, v_ctl_auto_throttle_igain, V_CTL_AUTO_THROTTLE_MAX_SUM_ERR, v_ctl_auto_throttle_pgain, v_ctl_auto_throttle_pitch_of_vz_dgain, v_ctl_auto_throttle_pitch_of_vz_pgain, V_CTL_AUTO_THROTTLE_STANDARD, v_ctl_auto_throttle_submode, v_ctl_auto_throttle_sum_err, v_ctl_climb_setpoint, v_ctl_pitch_setpoint, v_ctl_pitch_trim, v_ctl_throttle_setpoint, and EnuCoor_f::z.
Referenced by v_ctl_climb_loop().
Here is the call graph for this function: Here is the caller graph for this function:| void v_ctl_climb_loop | ( | void | ) |
Auto-throttle inner loop.
Definition at line 341 of file guidance_v.c.
References v_ctl_climb_auto_throttle_loop(), v_ctl_climb_mode, V_CTL_CLIMB_MODE_AUTO_PITCH, and V_CTL_CLIMB_MODE_AUTO_THROTTLE.
Referenced by v_ctl_guidance_loop().
Here is the call graph for this function: Here is the caller graph for this function:| void v_ctl_guidance_loop | ( | void | ) |
General guidance logic This will call the proper control loops according to the sub-modes.
Definition at line 265 of file guidance_v.c.
References ap_electrical, autopilot, pprz_autopilot::flight_time, pprz_autopilot::kill_throttle, pprz_autopilot::launch, MAX_PPRZ, nav_pitch, nav_throttle_setpoint, TRIM_PPRZ, TRIM_UPPRZ, v_ctl_altitude_loop(), v_ctl_climb_loop(), v_ctl_landing_loop(), v_ctl_mode, V_CTL_MODE_AUTO_ALT, V_CTL_MODE_AUTO_CLIMB, V_CTL_MODE_AUTO_THROTTLE, V_CTL_MODE_LANDING, v_ctl_pitch_setpoint, v_ctl_throttle_setpoint, and Electrical::vsupply.
Here is the call graph for this function:| void v_ctl_init | ( | void | ) |
Definition at line 172 of file guidance_v.c.
References v_ctl_altitude_error, v_ctl_altitude_max_climb, V_CTL_ALTITUDE_MAX_CLIMB, v_ctl_altitude_pgain, v_ctl_altitude_pre_climb, v_ctl_altitude_pre_climb_correction, V_CTL_ALTITUDE_PRE_CLIMB_CORRECTION, v_ctl_altitude_setpoint, v_ctl_auto_airspeed_controlled, v_ctl_auto_airspeed_setpoint, v_ctl_auto_groundspeed_igain, v_ctl_auto_groundspeed_pgain, v_ctl_auto_groundspeed_setpoint, v_ctl_auto_groundspeed_sum_err, V_CTL_AUTO_PITCH_IGAIN, v_ctl_auto_pitch_igain, v_ctl_auto_pitch_pgain, v_ctl_auto_pitch_sum_err, v_ctl_auto_throttle_climb_throttle_increment, v_ctl_auto_throttle_cruise_throttle, V_CTL_AUTO_THROTTLE_DGAIN, v_ctl_auto_throttle_dgain, v_ctl_auto_throttle_igain, v_ctl_auto_throttle_max_cruise_throttle, v_ctl_auto_throttle_min_cruise_throttle, v_ctl_auto_throttle_nominal_cruise_throttle, v_ctl_auto_throttle_pgain, v_ctl_auto_throttle_pitch_of_vz_dgain, V_CTL_AUTO_THROTTLE_PITCH_OF_VZ_DGAIN, v_ctl_auto_throttle_pitch_of_vz_pgain, V_CTL_AUTO_THROTTLE_STANDARD, v_ctl_auto_throttle_submode, v_ctl_auto_throttle_sum_err, v_ctl_climb_mode, V_CTL_CLIMB_MODE_AUTO_THROTTLE, v_ctl_climb_setpoint, v_ctl_mode, V_CTL_MODE_MANUAL, v_ctl_pitch_setpoint, V_CTL_PITCH_TRIM, v_ctl_pitch_trim, and v_ctl_throttle_setpoint.
| void v_ctl_landing_loop | ( | void | ) |
Definition at line 357 of file guidance_v.c.
References UtmCoor_f::alt, autopilot_throttle_killed(), CONTROL_FREQUENCY, h_ctl_roll_setpoint, lateral_mode, LATERAL_MODE_ROLL, MAX_PPRZ, nav_pitch, stateGetHorizontalSpeedNorm_f(), stateGetPositionUtm_f(), v_ctl_altitude_setpoint, and v_ctl_throttle_setpoint.
Referenced by attitude_loop(), and v_ctl_guidance_loop().
Here is the call graph for this function: Here is the caller graph for this function:| void v_ctl_throttle_slew | ( | void | ) |
Computes slewed throttle from throttle setpoint called at 20Hz.
Computes throttle_slewed from throttle_setpoint.
Definition at line 553 of file guidance_v.c.
References MAX_PPRZ, TRIM_PPRZ, v_ctl_throttle_setpoint, V_CTL_THROTTLE_SLEW, and v_ctl_throttle_slewed.
| float v_ctl_altitude_error |
in meters, (setpoint - alt) -> positive = too low
Definition at line 42 of file guidance_v.c.
Referenced by v_ctl_altitude_loop(), v_ctl_climb_auto_throttle_loop(), and v_ctl_init().
| float v_ctl_altitude_max_climb |
Definition at line 44 of file guidance_v.c.
Referenced by v_ctl_altitude_loop(), and v_ctl_init().
| float v_ctl_altitude_pgain |
Definition at line 41 of file guidance_v.c.
Referenced by v_ctl_altitude_loop(), and v_ctl_init().
| float v_ctl_altitude_pre_climb |
Path Angle.
Definition at line 40 of file guidance_v.c.
Referenced by v_ctl_altitude_loop(), and v_ctl_init().
| float v_ctl_altitude_pre_climb_correction |
Definition at line 43 of file guidance_v.c.
Referenced by v_ctl_altitude_loop(), and v_ctl_init().
| float v_ctl_altitude_setpoint |
in meters above MSL
Definition at line 39 of file guidance_v.c.
Referenced by v_ctl_altitude_loop(), v_ctl_init(), and v_ctl_landing_loop().
| float v_ctl_auto_pitch_igain |
Definition at line 85 of file guidance_v.c.
Referenced by v_ctl_init().
| float v_ctl_auto_pitch_pgain |
Definition at line 84 of file guidance_v.c.
Referenced by v_ctl_init().
| float v_ctl_auto_pitch_sum_err |
Definition at line 86 of file guidance_v.c.
Referenced by v_ctl_init().
| float v_ctl_auto_throttle_climb_throttle_increment |
Definition at line 60 of file guidance_v.c.
Referenced by v_ctl_climb_auto_throttle_loop(), and v_ctl_init().
| float v_ctl_auto_throttle_cruise_throttle |
Definition at line 56 of file guidance_v.c.
Referenced by v_ctl_climb_auto_throttle_loop(), and v_ctl_init().
| float v_ctl_auto_throttle_dgain |
Definition at line 63 of file guidance_v.c.
Referenced by v_ctl_climb_auto_throttle_loop(), and v_ctl_init().
| float v_ctl_auto_throttle_igain |
Definition at line 62 of file guidance_v.c.
Referenced by v_ctl_climb_auto_throttle_loop(), and v_ctl_init().
| float v_ctl_auto_throttle_max_cruise_throttle |
Definition at line 59 of file guidance_v.c.
Referenced by v_ctl_init().
| float v_ctl_auto_throttle_min_cruise_throttle |
Definition at line 58 of file guidance_v.c.
Referenced by v_ctl_init().
| float v_ctl_auto_throttle_nominal_cruise_throttle |
Definition at line 57 of file guidance_v.c.
Referenced by v_ctl_init().
| float v_ctl_auto_throttle_pgain |
Definition at line 61 of file guidance_v.c.
Referenced by v_ctl_climb_auto_throttle_loop(), and v_ctl_init().
| float v_ctl_auto_throttle_pitch_of_vz_dgain |
Definition at line 67 of file guidance_v.c.
Referenced by v_ctl_climb_auto_throttle_loop(), and v_ctl_init().
| float v_ctl_auto_throttle_pitch_of_vz_pgain |
Definition at line 66 of file guidance_v.c.
Referenced by v_ctl_climb_auto_throttle_loop(), and v_ctl_init().
| uint8_t v_ctl_auto_throttle_submode |
Definition at line 49 of file guidance_v.c.
Referenced by v_ctl_altitude_loop(), v_ctl_climb_auto_throttle_loop(), and v_ctl_init().
| float v_ctl_auto_throttle_sum_err |
Definition at line 64 of file guidance_v.c.
Referenced by v_ctl_climb_auto_throttle_loop(), and v_ctl_init().
| uint8_t v_ctl_climb_mode |
Definition at line 48 of file guidance_v.c.
Referenced by v_ctl_altitude_loop(), v_ctl_climb_loop(), and v_ctl_init().
| float v_ctl_climb_setpoint |
Definition at line 47 of file guidance_v.c.
Referenced by v_ctl_altitude_loop(), v_ctl_climb_auto_throttle_loop(), and v_ctl_init().
| uint8_t v_ctl_mode |
Definition at line 36 of file guidance_v.c.
Referenced by v_ctl_guidance_loop(), and v_ctl_init().
| float v_ctl_pitch_setpoint |
Definition at line 91 of file guidance_v.c.
Referenced by v_ctl_climb_auto_throttle_loop(), v_ctl_guidance_loop(), and v_ctl_init().
| float v_ctl_pitch_trim |
Definition at line 95 of file guidance_v.c.
Referenced by v_ctl_climb_auto_throttle_loop(), and v_ctl_init().
| pprz_t v_ctl_throttle_setpoint |
Definition at line 89 of file guidance_v.c.
Referenced by v_ctl_climb_auto_throttle_loop(), v_ctl_guidance_loop(), v_ctl_init(), v_ctl_landing_loop(), and v_ctl_throttle_slew().
| pprz_t v_ctl_throttle_slewed |
Definition at line 90 of file guidance_v.c.
Referenced by v_ctl_throttle_slew().
 1.8.8
1.8.8