|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
Autopilot guided mode interface. More...
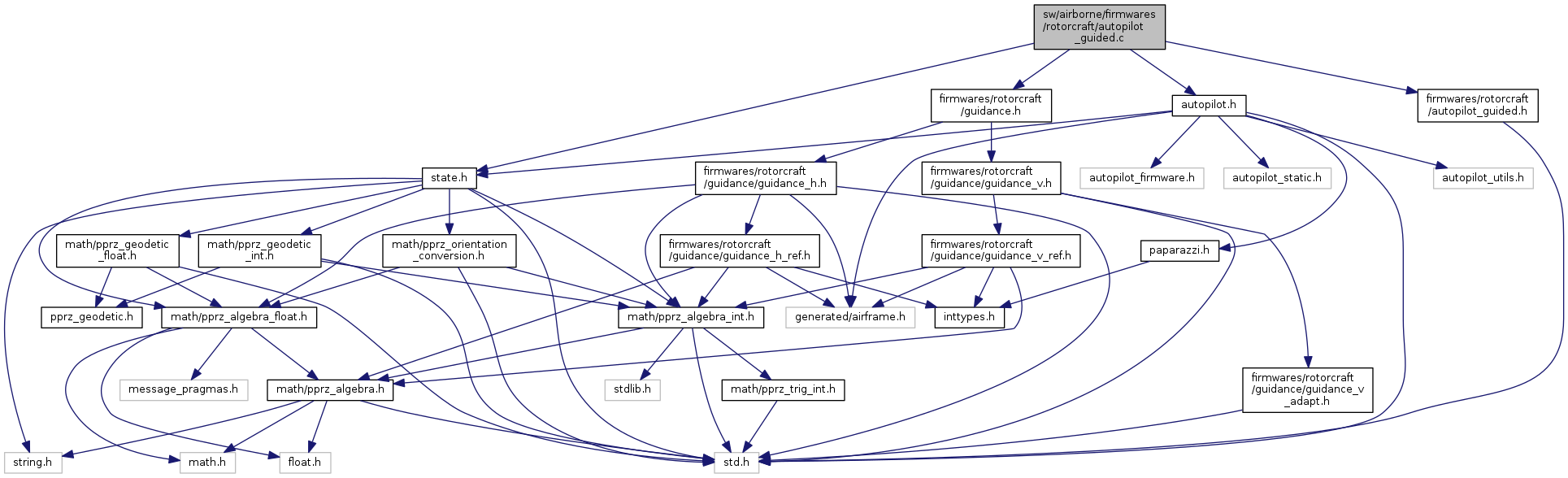
#include "firmwares/rotorcraft/autopilot_guided.h"#include "autopilot.h"#include "firmwares/rotorcraft/guidance.h"#include "state.h" Include dependency graph for autopilot_guided.c:
Include dependency graph for autopilot_guided.c:Go to the source code of this file.
Functions | |
| bool | autopilot_guided_goto_ned (float x, float y, float z, float heading) |
| Set position and heading setpoints in GUIDED mode. More... | |
| bool | autopilot_guided_goto_ned_relative (float dx, float dy, float dz, float dyaw) |
| Set position and heading setpoints wrt. More... | |
| bool | autopilot_guided_goto_body_relative (float dx, float dy, float dz, float dyaw) |
| Set position and heading setpoints wrt. More... | |
| bool | autopilot_guided_move_ned (float vx, float vy, float vz, float heading) |
| Set velocity and heading setpoints in GUIDED mode. More... | |
| void | autopilot_guided_update (uint8_t flags, float x, float y, float z, float yaw) |
| Set guided setpoints using flag mask in GUIDED mode. More... | |
Autopilot guided mode interface.
Definition in file autopilot_guided.c.
| bool autopilot_guided_goto_body_relative | ( | float | dx, |
| float | dy, | ||
| float | dz, | ||
| float | dyaw | ||
| ) |
Set position and heading setpoints wrt.
current position AND heading in GUIDED mode.
| dx | relative position (body frame, forward) in meters. |
| dy | relative position (body frame, right) in meters. |
| dz | relative position (body frame, down) in meters. |
| dyaw | Offset relative to current heading setpoint in radians. |
Definition at line 58 of file autopilot_guided.c.
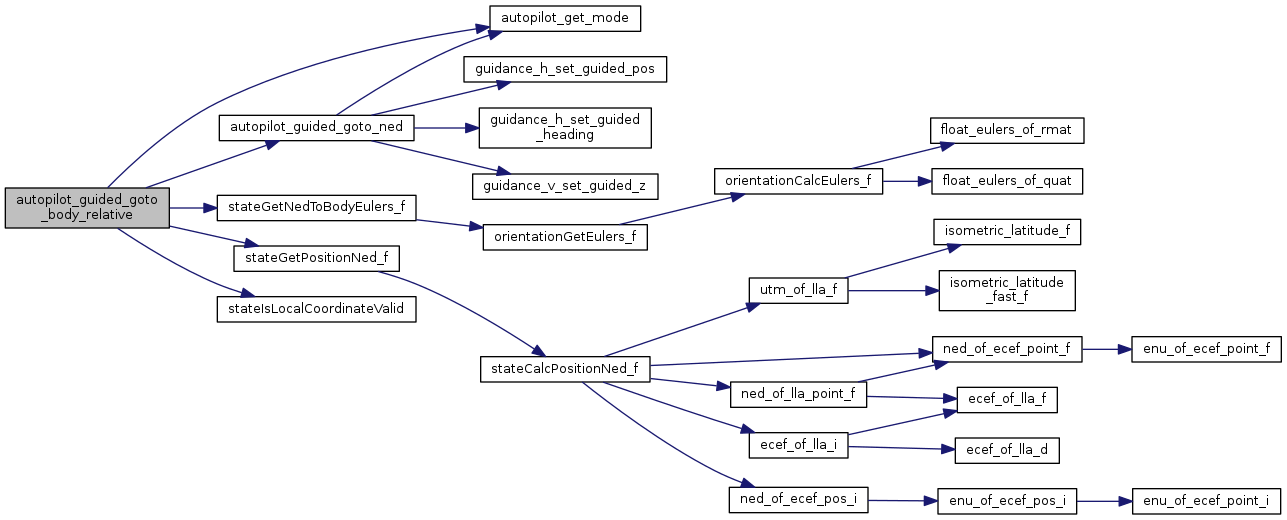
References AP_MODE_GUIDED, autopilot_get_mode(), autopilot_guided_goto_ned(), heading, FloatEulers::psi, stateGetNedToBodyEulers_f(), stateGetPositionNed_f(), stateIsLocalCoordinateValid(), NedCoor_f::x, NedCoor_f::y, and NedCoor_f::z.
Referenced by mavlink_common_message_handler().
Here is the call graph for this function: Here is the caller graph for this function:| bool autopilot_guided_goto_ned | ( | float | x, |
| float | y, | ||
| float | z, | ||
| float | heading | ||
| ) |
Set position and heading setpoints in GUIDED mode.
| x | North position (local NED frame) in meters. |
| y | East position (local NED frame) in meters. |
| z | Down position (local NED frame) in meters. |
| heading | Setpoint in radians. |
Definition at line 35 of file autopilot_guided.c.
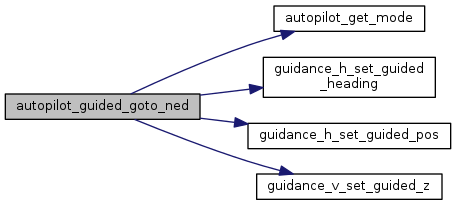
References AP_MODE_GUIDED, autopilot_get_mode(), guidance_h_set_guided_heading(), guidance_h_set_guided_pos(), and guidance_v_set_guided_z().
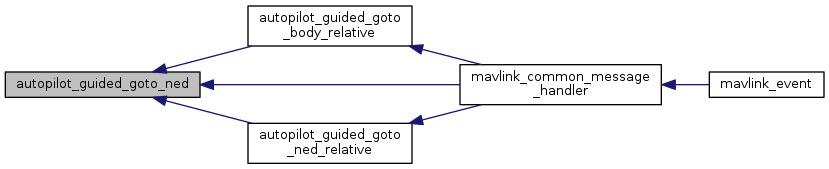
Referenced by autopilot_guided_goto_body_relative(), autopilot_guided_goto_ned_relative(), and mavlink_common_message_handler().
Here is the call graph for this function: Here is the caller graph for this function:| bool autopilot_guided_goto_ned_relative | ( | float | dx, |
| float | dy, | ||
| float | dz, | ||
| float | dyaw | ||
| ) |
Set position and heading setpoints wrt.
current position in GUIDED mode.
| dx | Offset relative to current north position (local NED frame) in meters. |
| dy | Offset relative to current east position (local NED frame) in meters. |
| dz | Offset relative to current down position (local NED frame) in meters. |
| dyaw | Offset relative to current heading setpoint in radians. |
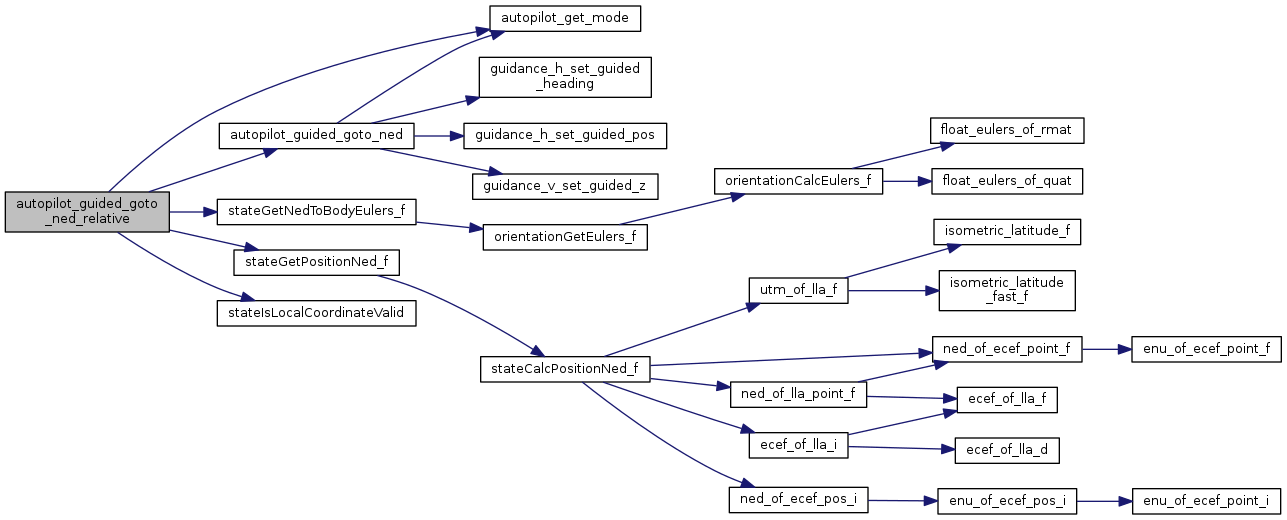
Definition at line 46 of file autopilot_guided.c.
References AP_MODE_GUIDED, autopilot_get_mode(), autopilot_guided_goto_ned(), heading, FloatEulers::psi, stateGetNedToBodyEulers_f(), stateGetPositionNed_f(), stateIsLocalCoordinateValid(), NedCoor_f::x, NedCoor_f::y, and NedCoor_f::z.
Referenced by mavlink_common_message_handler().
Here is the call graph for this function: Here is the caller graph for this function:| bool autopilot_guided_move_ned | ( | float | vx, |
| float | vy, | ||
| float | vz, | ||
| float | heading | ||
| ) |
Set velocity and heading setpoints in GUIDED mode.
| vx | North velocity (local NED frame) in meters/sec. |
| vy | East velocity (local NED frame) in meters/sec. |
| vz | Down velocity (local NED frame) in meters/sec. |
| heading | Setpoint in radians. |
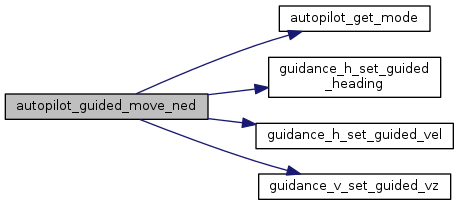
Definition at line 71 of file autopilot_guided.c.
References AP_MODE_GUIDED, autopilot_get_mode(), guidance_h_set_guided_heading(), guidance_h_set_guided_vel(), and guidance_v_set_guided_vz().
Referenced by mavlink_common_message_handler().
Here is the call graph for this function: Here is the caller graph for this function:| void autopilot_guided_update | ( | uint8_t | flags, |
| float | x, | ||
| float | y, | ||
| float | z, | ||
| float | yaw | ||
| ) |
Set guided setpoints using flag mask in GUIDED mode.
| flags | Bits 0-3 are used to determine the axis system to be used. If bits 0 and 1 are clear then the coordinates are set in absolute NE coordinates. If bit 1 is set bit 0 is ignored. Bits 5-7 define whether the setpoints should be used as position or velocity. Bit flags are defined as follows: bit 0: x,y as offset coordinates bit 1: x,y in body coordinates bit 2: z as offset coordinates bit 3: yaw as offset coordinates bit 4: free bit 5: x,y as vel bit 6: z as vel bit 7: yaw as rate |
| x | North position/velocity in meters or meters/sec. |
| y | East position/velocity in meters or meters/sec. |
| z | Down position/velocity in meters or meters/sec. |
| yaw | Heading or heading rate setpoint in radians or radians/sec. |
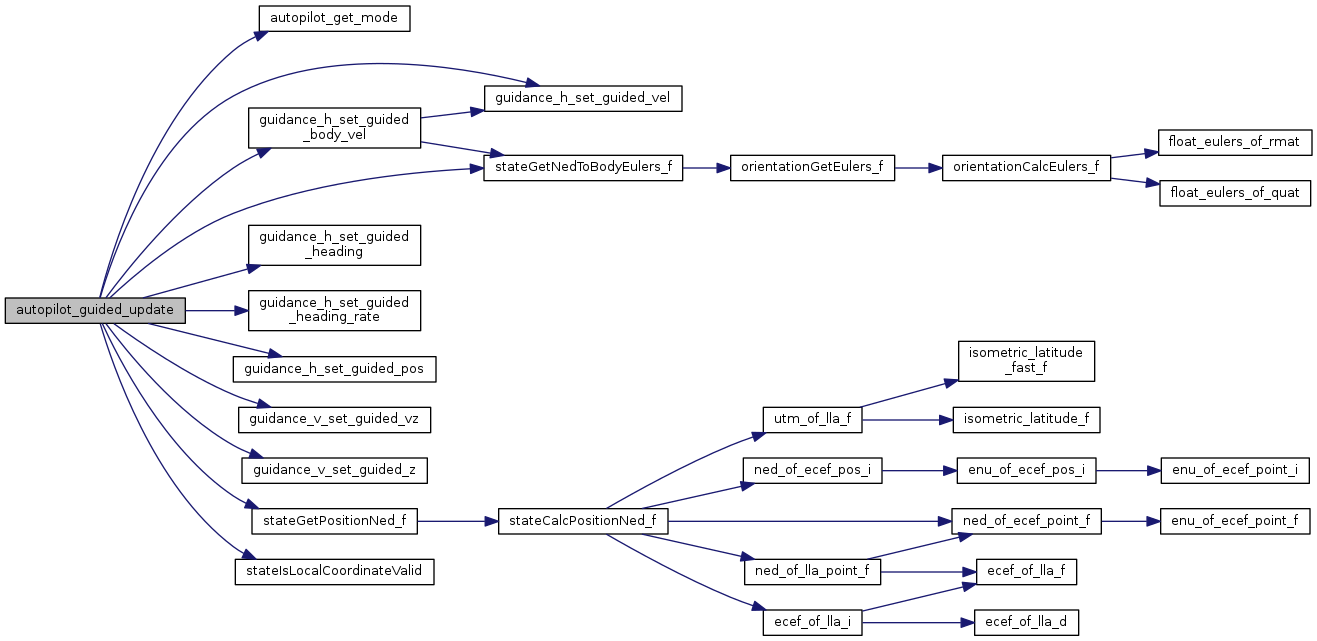
Definition at line 95 of file autopilot_guided.c.
References AP_MODE_GUIDED, autopilot_get_mode(), guidance_h_set_guided_body_vel(), guidance_h_set_guided_heading(), guidance_h_set_guided_heading_rate(), guidance_h_set_guided_pos(), guidance_h_set_guided_vel(), guidance_v_set_guided_vz(), guidance_v_set_guided_z(), FloatEulers::psi, stateGetNedToBodyEulers_f(), stateGetPositionNed_f(), stateIsLocalCoordinateValid(), FloatVect2::x, NedCoor_f::x, FloatVect2::y, NedCoor_f::y, and NedCoor_f::z.
Referenced by firmware_parse_msg().
Here is the call graph for this function: Here is the caller graph for this function: 1.8.8
1.8.8