|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
Guidance controllers (horizontal and vertical) for Hybrid UAV configurations. More...
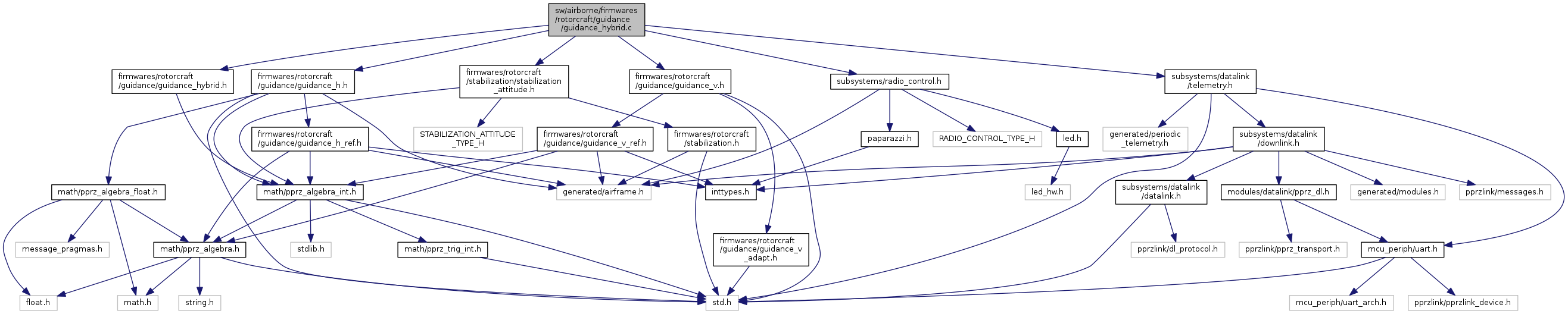
#include "firmwares/rotorcraft/guidance/guidance_hybrid.h"#include "firmwares/rotorcraft/guidance/guidance_h.h"#include "subsystems/radio_control.h"#include "firmwares/rotorcraft/stabilization/stabilization_attitude.h"#include "firmwares/rotorcraft/guidance/guidance_v.h"#include "subsystems/datalink/telemetry.h" Include dependency graph for guidance_hybrid.c:
Include dependency graph for guidance_hybrid.c:Go to the source code of this file.
Macros | |
| #define | MAX_AIRSPEED 15 |
| #define | INT32_ANGLE_HIGH_RES_FRAC 18 |
| #define | INT32_ANGLE_HIGH_RES_NORMALIZE(_a) |
Functions | |
| static void | send_hybrid_guidance (struct transport_tx *trans, struct link_device *dev) |
| void | guidance_hybrid_init (void) |
| Hybrid Guidance Initialization function. More... | |
| void | guidance_hybrid_run (void) |
| Runs the Hybrid Guidance main functions. More... | |
| void | guidance_hybrid_reset_heading (struct Int32Eulers *sp_cmd) |
| Description. More... | |
| void | guidance_hybrid_airspeed_to_attitude (struct Int32Eulers *ypr_sp) |
| Convert a required airspeed to a certain attitude for the Quadshot. More... | |
| void | guidance_hybrid_position_to_airspeed (void) |
| Description. More... | |
| void | guidance_hybrid_determine_wind_estimate (void) |
| Description. More... | |
| void | guidance_hybrid_set_cmd_i (struct Int32Eulers *sp_cmd) |
| Creates the attitude set-points from an orientation vector. More... | |
| void | guidance_hybrid_vertical (void) |
| Description. More... | |
Variables | |
| int32_t | guidance_hybrid_norm_ref_airspeed |
| float | alt_pitch_gain = 0.3 |
| int32_t | max_airspeed = MAX_AIRSPEED |
| int32_t | wind_gain |
| int32_t | horizontal_speed_gain |
| float | max_turn_bank |
| float | turn_bank_gain |
| static struct Int32Eulers | guidance_hybrid_ypr_sp |
| static struct Int32Vect2 | guidance_hybrid_airspeed_sp |
| static struct Int32Vect2 | guidance_h_pos_err |
| static struct Int32Vect2 | guidance_hybrid_airspeed_ref |
| static struct Int32Vect2 | wind_estimate |
| static struct Int32Vect2 | wind_estimate_high_res |
| static struct Int32Vect2 | guidance_hybrid_ref_airspeed |
| static int32_t | norm_sp_airspeed_disp |
| static int32_t | heading_diff_disp |
| static int32_t | omega_disp |
| static int32_t | high_res_psi |
| static int32_t | airspeed_sp_heading_disp |
| static bool | guidance_hovering |
| bool | force_forward_flight |
| static int32_t | v_control_pitch |
Guidance controllers (horizontal and vertical) for Hybrid UAV configurations.
Functionality: 1) hover with (helicopter) thrust vectoring and align the heading with the wind vector. 2) Forward flight with using pitch and a bit of thrust to control altitude and heading to control the velocity vector 3) Transition between the two, with the possibility to fly at any airspeed
Definition in file guidance_hybrid.c.
| #define INT32_ANGLE_HIGH_RES_FRAC 18 |
Definition at line 46 of file guidance_hybrid.c.
Referenced by guidance_hybrid_airspeed_to_attitude(), and guidance_hybrid_reset_heading().
| #define INT32_ANGLE_HIGH_RES_NORMALIZE | ( | _a | ) |
Definition at line 124 of file guidance_hybrid.c.
Referenced by guidance_hybrid_airspeed_to_attitude().
| #define MAX_AIRSPEED 15 |
Definition at line 44 of file guidance_hybrid.c.
| void guidance_hybrid_airspeed_to_attitude | ( | struct Int32Eulers * | ypr_sp | ) |
Convert a required airspeed to a certain attitude for the Quadshot.
Convert a required airspeed to a certain attitude for the Hybrid.
if required speed is lower than 4 m/s act like a rotorcraft
if required speed is higher than 4 m/s act like a fixedwing
Definition at line 145 of file guidance_hybrid.c.
References airspeed_sp_heading_disp, ANGLE_BFP_OF_REAL, ANGLE_FLOAT_OF_BFP, FLOAT_ANGLE_NORMALIZE, guidance_hybrid_airspeed_sp, guidance_hybrid_norm_ref_airspeed, guidance_hybrid_ref_airspeed, heading_diff_disp, high_res_psi, INT32_ANGLE_FRAC, INT32_ANGLE_HIGH_RES_FRAC, INT32_ANGLE_HIGH_RES_NORMALIZE, INT32_ANGLE_PI, INT32_POS_FRAC, INT32_TRIG_FRAC, int32_vect2_norm(), max_turn_bank, norm_sp_airspeed_disp, omega_disp, Int32Eulers::phi, POS_FLOAT_OF_BFP, PPRZ_ITRIG_COS, PPRZ_ITRIG_SIN, Int32Eulers::psi, Int32Eulers::theta, turn_bank_gain, v_control_pitch, Int32Vect2::x, and Int32Vect2::y.
Referenced by guidance_hybrid_run().
Here is the call graph for this function: Here is the caller graph for this function:| void guidance_hybrid_determine_wind_estimate | ( | void | ) |
Description.
Definition at line 332 of file guidance_hybrid.c.
References guidance_hybrid_ref_airspeed, INT32_VECT2_RSHIFT, stateGetSpeedNed_i(), VECT2_DIFF, wind_estimate, wind_estimate_high_res, wind_gain, Int32Vect2::x, and Int32Vect2::y.
Referenced by guidance_hybrid_run().
Here is the call graph for this function: Here is the caller graph for this function:| void guidance_hybrid_init | ( | void | ) |
Hybrid Guidance Initialization function.
Definition at line 99 of file guidance_hybrid.c.
References DefaultPeriodic, force_forward_flight, guidance_hovering, guidance_hybrid_airspeed_ref, guidance_hybrid_airspeed_sp, guidance_hybrid_norm_ref_airspeed, guidance_hybrid_ref_airspeed, guidance_hybrid_ypr_sp, high_res_psi, horizontal_speed_gain, INT_EULERS_ZERO, INT_VECT2_ZERO, max_turn_bank, register_periodic_telemetry(), send_hybrid_guidance(), turn_bank_gain, wind_estimate, wind_estimate_high_res, and wind_gain.
Here is the call graph for this function:| void guidance_hybrid_position_to_airspeed | ( | void | ) |
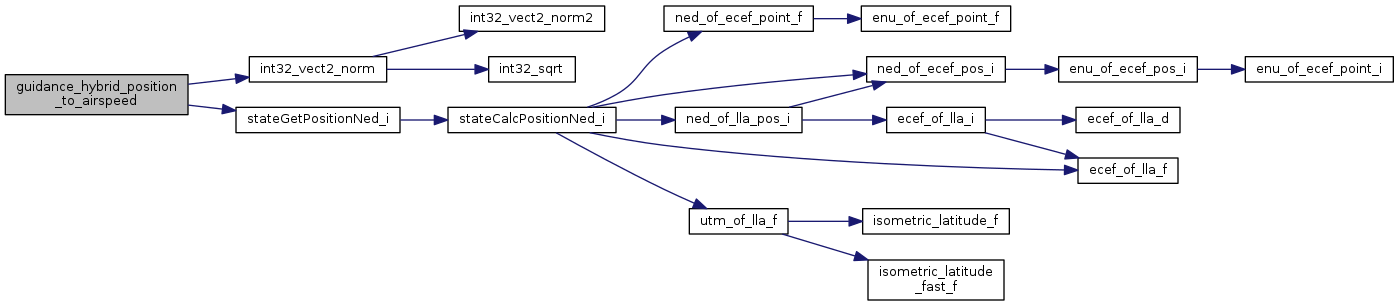
Description.
Definition at line 264 of file guidance_hybrid.c.
References force_forward_flight, guidance_h, guidance_h_pos_err, guidance_hybrid_airspeed_sp, guidance_hybrid_ypr_sp, horizontal_speed_gain, INT32_TRIG_FRAC, int32_vect2_norm(), INT_MULT_RSHIFT, INT_VECT2_ZERO, max_airspeed, HorizontalGuidanceSetpoint::pos, POS_BFP_OF_REAL, POS_FLOAT_OF_BFP, PPRZ_ITRIG_COS, PPRZ_ITRIG_SIN, Int32Eulers::psi, HorizontalGuidance::sp, stateGetPositionNed_i(), VECT2_ADD, VECT2_DIFF, VECT2_SDIV, wind_estimate, Int32Vect2::x, and Int32Vect2::y.
Referenced by guidance_hybrid_run().
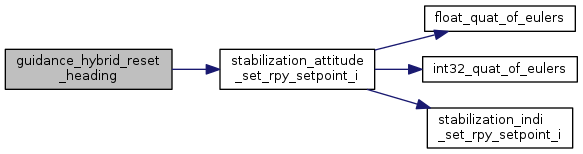
Here is the call graph for this function: Here is the caller graph for this function:| void guidance_hybrid_reset_heading | ( | struct Int32Eulers * | sp_cmd | ) |
Description.
| sp_cmd | Add Description |
Definition at line 137 of file guidance_hybrid.c.
References guidance_hybrid_ypr_sp, high_res_psi, INT32_ANGLE_FRAC, INT32_ANGLE_HIGH_RES_FRAC, Int32Eulers::psi, and stabilization_attitude_set_rpy_setpoint_i().
Referenced by guidance_h_from_nav().
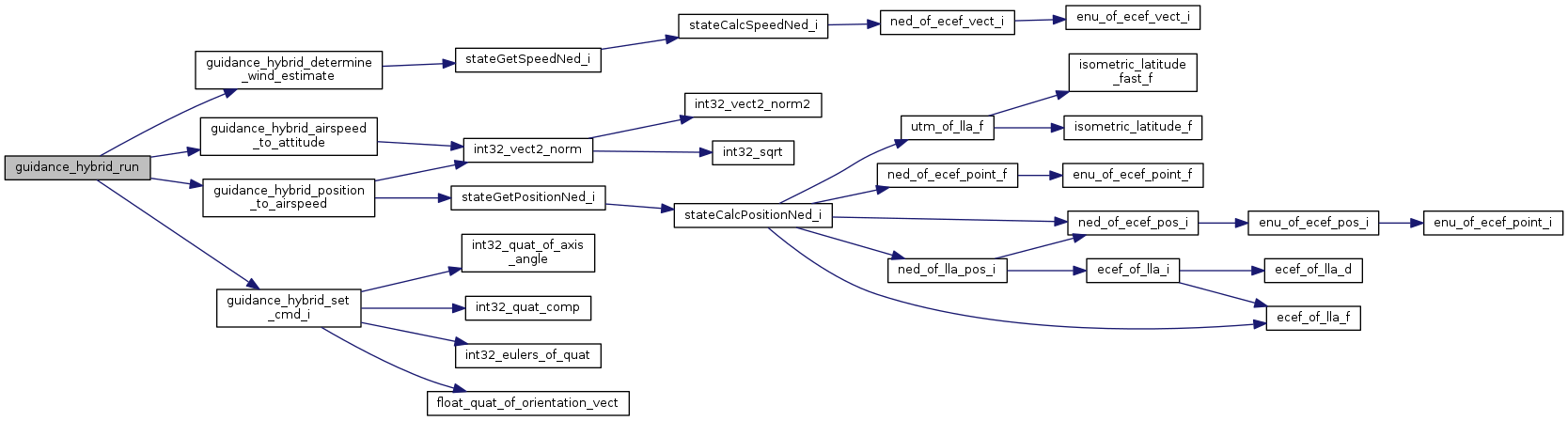
Here is the call graph for this function: Here is the caller graph for this function:| void guidance_hybrid_run | ( | void | ) |
Runs the Hybrid Guidance main functions.
Definition at line 129 of file guidance_hybrid.c.
References guidance_hybrid_airspeed_to_attitude(), guidance_hybrid_determine_wind_estimate(), guidance_hybrid_position_to_airspeed(), guidance_hybrid_set_cmd_i(), and guidance_hybrid_ypr_sp.
Referenced by guidance_h_from_nav().
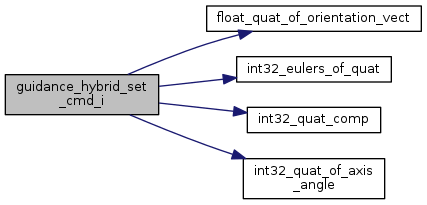
Here is the call graph for this function: Here is the caller graph for this function:| void guidance_hybrid_set_cmd_i | ( | struct Int32Eulers * | sp_cmd | ) |
Creates the attitude set-points from an orientation vector.
| sp_cmd | The orientation vector |
Definition at line 350 of file guidance_hybrid.c.
References ANGLE_FLOAT_OF_BFP, float_quat_of_orientation_vect(), int32_eulers_of_quat(), int32_quat_comp(), int32_quat_of_axis_angle(), Int32Eulers::phi, Int32Eulers::psi, QUAT_BFP_OF_REAL, stab_att_sp_euler, stab_att_sp_quat, Int32Eulers::theta, FloatVect3::x, FloatVect3::y, and FloatVect3::z.
Referenced by guidance_hybrid_run().
Here is the call graph for this function: Here is the caller graph for this function:| void guidance_hybrid_vertical | ( | void | ) |
Description.
Definition at line 378 of file guidance_hybrid.c.
References alt_pitch_gain, ANGLE_BFP_OF_REAL, guidance_hybrid_norm_ref_airspeed, guidance_v_delta_t, guidance_v_kd, guidance_v_ki, guidance_v_kp, guidance_v_nominal_throttle, INT_MULT_RSHIFT, MAX_PPRZ, stabilization_cmd, and v_control_pitch.
Referenced by guidance_v_from_nav().
Here is the caller graph for this function:
|
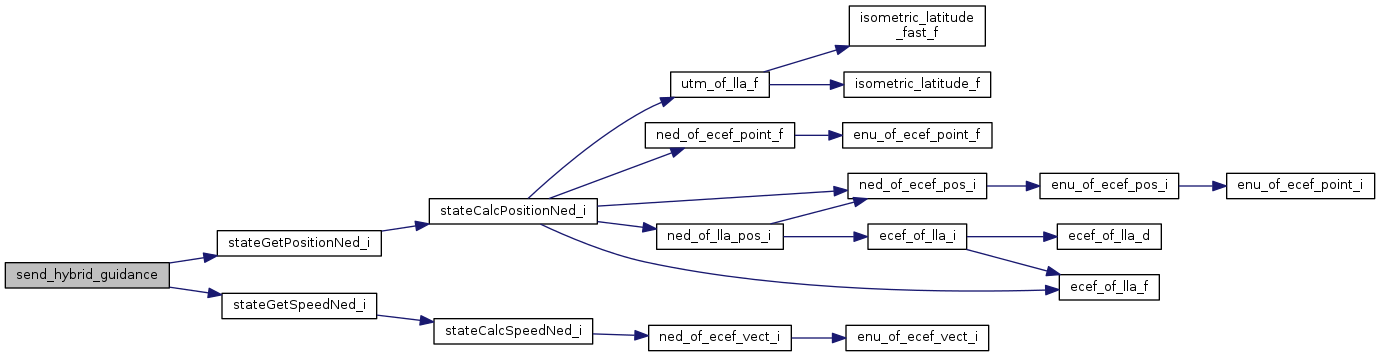
static |
Definition at line 78 of file guidance_hybrid.c.
References guidance_h_pos_err, guidance_hybrid_airspeed_sp, guidance_hybrid_norm_ref_airspeed, guidance_hybrid_ypr_sp, heading_diff_disp, Int32Eulers::phi, Int32Eulers::psi, stateGetPositionNed_i(), stateGetSpeedNed_i(), Int32Eulers::theta, wind_estimate, NedCoor_i::x, Int32Vect2::x, NedCoor_i::y, and Int32Vect2::y.
Referenced by guidance_hybrid_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 70 of file guidance_hybrid.c.
Referenced by guidance_hybrid_airspeed_to_attitude().
| float alt_pitch_gain = 0.3 |
Definition at line 50 of file guidance_hybrid.c.
Referenced by guidance_hybrid_vertical().
| bool force_forward_flight |
Definition at line 72 of file guidance_hybrid.c.
Referenced by guidance_hybrid_init(), and guidance_hybrid_position_to_airspeed().
|
static |
Definition at line 60 of file guidance_hybrid.c.
Referenced by guidance_hybrid_position_to_airspeed(), and send_hybrid_guidance().
|
static |
Definition at line 71 of file guidance_hybrid.c.
Referenced by guidance_hybrid_init().
|
static |
Definition at line 61 of file guidance_hybrid.c.
Referenced by guidance_hybrid_init().
|
static |
Definition at line 59 of file guidance_hybrid.c.
Referenced by guidance_hybrid_airspeed_to_attitude(), guidance_hybrid_init(), guidance_hybrid_position_to_airspeed(), and send_hybrid_guidance().
| int32_t guidance_hybrid_norm_ref_airspeed |
Definition at line 49 of file guidance_hybrid.c.
Referenced by guidance_h_mode_changed(), guidance_hybrid_airspeed_to_attitude(), guidance_hybrid_init(), guidance_hybrid_vertical(), and send_hybrid_guidance().
|
static |
Definition at line 64 of file guidance_hybrid.c.
Referenced by guidance_hybrid_airspeed_to_attitude(), guidance_hybrid_determine_wind_estimate(), and guidance_hybrid_init().
|
static |
Definition at line 58 of file guidance_hybrid.c.
Referenced by guidance_hybrid_init(), guidance_hybrid_position_to_airspeed(), guidance_hybrid_reset_heading(), guidance_hybrid_run(), and send_hybrid_guidance().
|
static |
Definition at line 67 of file guidance_hybrid.c.
Referenced by guidance_hybrid_airspeed_to_attitude(), and send_hybrid_guidance().
|
static |
Definition at line 69 of file guidance_hybrid.c.
Referenced by guidance_hybrid_airspeed_to_attitude(), guidance_hybrid_init(), and guidance_hybrid_reset_heading().
| int32_t horizontal_speed_gain |
Definition at line 53 of file guidance_hybrid.c.
Referenced by guidance_hybrid_init(), and guidance_hybrid_position_to_airspeed().
| int32_t max_airspeed = MAX_AIRSPEED |
Definition at line 51 of file guidance_hybrid.c.
Referenced by guidance_hybrid_position_to_airspeed().
| float max_turn_bank |
Definition at line 54 of file guidance_hybrid.c.
Referenced by guidance_hybrid_airspeed_to_attitude(), and guidance_hybrid_init().
|
static |
Definition at line 66 of file guidance_hybrid.c.
Referenced by guidance_hybrid_airspeed_to_attitude().
|
static |
Definition at line 68 of file guidance_hybrid.c.
Referenced by guidance_hybrid_airspeed_to_attitude().
| float turn_bank_gain |
Definition at line 55 of file guidance_hybrid.c.
Referenced by guidance_hybrid_airspeed_to_attitude(), and guidance_hybrid_init().
|
static |
Definition at line 73 of file guidance_hybrid.c.
Referenced by guidance_hybrid_airspeed_to_attitude(), and guidance_hybrid_vertical().
|
static |
Definition at line 62 of file guidance_hybrid.c.
Referenced by guidance_hybrid_determine_wind_estimate(), guidance_hybrid_init(), guidance_hybrid_position_to_airspeed(), and send_hybrid_guidance().
|
static |
Definition at line 63 of file guidance_hybrid.c.
Referenced by guidance_hybrid_determine_wind_estimate(), and guidance_hybrid_init().
| int32_t wind_gain |
Definition at line 52 of file guidance_hybrid.c.
Referenced by guidance_hybrid_determine_wind_estimate(), and guidance_hybrid_init().
 1.8.8
1.8.8