|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
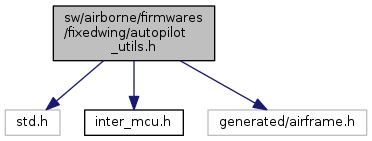
Utility functions and includes for autopilots. More...
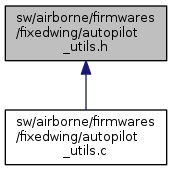
 Include dependency graph for autopilot_utils.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for autopilot_utils.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | AP_MODE_OF_PULSE(pprz) |
| Get mode from pulse. More... | |
| #define | STICK_PUSHED(pprz) (pprz < THRESHOLD1 || pprz > THRESHOLD2) |
| Stick pushed. More... | |
| #define | FLOAT_OF_PPRZ(pprz, center, travel) ((float)pprz / (float)MAX_PPRZ * travel + center) |
| pprz_t to float with saturation More... | |
| #define | THROTTLE_THRESHOLD_TAKEOFF (pprz_t)(MAX_PPRZ * 0.9) |
| Takeoff detection threshold from throttle. More... | |
| #define | THRESHOLD_MANUAL_PPRZ (MIN_PPRZ / 2) |
| Threshold for RC mode detection. More... | |
| #define | THRESHOLD1 THRESHOLD_MANUAL_PPRZ |
| #define | THRESHOLD2 (MAX_PPRZ/2) |
| #define | AP_COMMAND_SET_ROLL(_roll) { ap_state->commands[COMMAND_ROLL] = _roll; } |
| AP command setter macros for usual commands. More... | |
| #define | AP_COMMAND_SET_PITCH(_pitch) { ap_state->commands[COMMAND_PITCH] = _pitch; } |
| #define | AP_COMMAND_SET_YAW(_yaw) {} |
| #define | AP_COMMAND_SET_THROTTLE(_throttle) { ap_state->commands[COMMAND_THROTTLE] = _throttle; } |
| #define | AP_COMMAND_SET_CL(_cl) {} |
| #define | AP_SETPOINT_ROLL(_roll, _max) |
| #define | AP_SETPOINT_PITCH(_pitch, _max) |
| #define | AP_SETPOINT_YAW_RATE(_yaw, _max) {} |
| #define | AP_SETPOINT_THROTTLE(_throttle) |
Utility functions and includes for autopilots.
Definition in file autopilot_utils.h.
| #define AP_COMMAND_SET_CL | ( | _cl | ) | {} |
Definition at line 83 of file autopilot_utils.h.
Definition at line 67 of file autopilot_utils.h.
AP command setter macros for usual commands.
Definition at line 64 of file autopilot_utils.h.
Definition at line 77 of file autopilot_utils.h.
| #define AP_COMMAND_SET_YAW | ( | _yaw | ) | {} |
Definition at line 73 of file autopilot_utils.h.
| #define AP_MODE_OF_PULSE | ( | pprz | ) |
Get mode from pulse.
Definition at line 38 of file autopilot_utils.h.
Referenced by pprz_mode_update().
| #define AP_SETPOINT_PITCH | ( | _pitch, | |
| _max | |||
| ) |
Definition at line 92 of file autopilot_utils.h.
| #define AP_SETPOINT_ROLL | ( | _roll, | |
| _max | |||
| ) |
Definition at line 87 of file autopilot_utils.h.
| #define AP_SETPOINT_THROTTLE | ( | _throttle | ) |
Definition at line 106 of file autopilot_utils.h.
| #define AP_SETPOINT_YAW_RATE | ( | _yaw, | |
| _max | |||
| ) | {} |
Definition at line 102 of file autopilot_utils.h.
| #define FLOAT_OF_PPRZ | ( | pprz, | |
| center, | |||
| travel | |||
| ) | ((float)pprz / (float)MAX_PPRZ * travel + center) |
pprz_t to float with saturation
Definition at line 48 of file autopilot_utils.h.
Referenced by autopilot_static_on_rc_frame().
| #define STICK_PUSHED | ( | pprz | ) | (pprz < THRESHOLD1 || pprz > THRESHOLD2) |
Stick pushed.
Definition at line 44 of file autopilot_utils.h.
| #define THRESHOLD1 THRESHOLD_MANUAL_PPRZ |
Definition at line 57 of file autopilot_utils.h.
| #define THRESHOLD2 (MAX_PPRZ/2) |
Definition at line 58 of file autopilot_utils.h.
Referenced by pprz_mode_update().
| #define THRESHOLD_MANUAL_PPRZ (MIN_PPRZ / 2) |
Threshold for RC mode detection.
Definition at line 56 of file autopilot_utils.h.
Takeoff detection threshold from throttle.
Definition at line 52 of file autopilot_utils.h.
Referenced by autopilot_static_on_rc_frame().
 1.8.8
1.8.8