|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
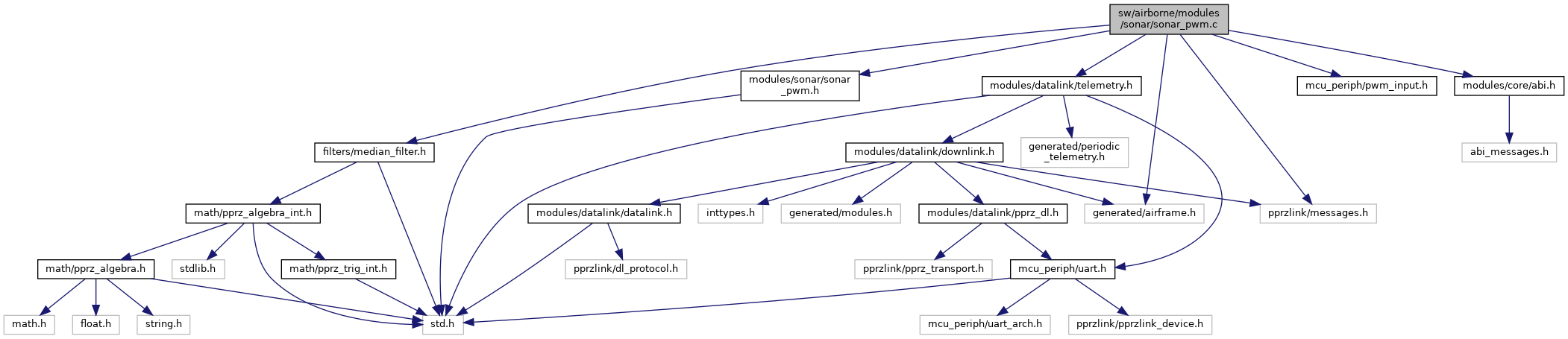
#include "modules/sonar/sonar_pwm.h"#include "mcu_periph/pwm_input.h"#include "modules/core/abi.h"#include "filters/median_filter.h"#include "modules/datalink/telemetry.h"#include "pprzlink/messages.h"#include "generated/airframe.h" Include dependency graph for sonar_pwm.c:
Include dependency graph for sonar_pwm.c:Go to the source code of this file.
Macros | |
| #define | SONAR_OFFSET 0 |
| The input channel of the PWM based sensor. | |
| #define | SONAR_PWM_PERIOD 4096 |
| Default to a 12 bit PWM sensor. | |
| #define | SONAR_SCALE SONAR_PWM_PERIOD |
| Ranger scale or sensitivity as you wish. | |
| #define | SONAR_MEDIAN_SIZE 7 |
| The Median Filter strength. | |
| #define | SONAR_MIN_RANGE 0.15f |
| The minimum range for the device to be able to measure. | |
| #define | SONAR_MAX_RANGE 7.0f |
| The maximum range for the device to be able to measure. | |
| #define | SONAR_PWM_OFFSET 820 |
| Some sensor may need an initial PWM offset (823 usec in the case of an EZ1 sensor) | |
| #define | SENSOR_SYNC_SEND_SONAR TRUE |
Functions | |
| void | sonar_pwm_init (void) |
| void | sonar_pwm_read (void) |
Variables | |
| struct SonarPwm | sonar_pwm |
Definition at line 103 of file sonar_pwm.c.
| #define SONAR_MAX_RANGE 7.0f |
The maximum range for the device to be able to measure.
Definition at line 93 of file sonar_pwm.c.
| #define SONAR_MEDIAN_SIZE 7 |
The Median Filter strength.
Definition at line 83 of file sonar_pwm.c.
The minimum range for the device to be able to measure.
Definition at line 88 of file sonar_pwm.c.
| #define SONAR_OFFSET 0 |
The input channel of the PWM based sensor.
Ranger offset value for what considered the distance should be zero
Definition at line 68 of file sonar_pwm.c.
| #define SONAR_PWM_OFFSET 820 |
Some sensor may need an initial PWM offset (823 usec in the case of an EZ1 sensor)
Definition at line 98 of file sonar_pwm.c.
| #define SONAR_PWM_PERIOD 4096 |
Default to a 12 bit PWM sensor.
Definition at line 73 of file sonar_pwm.c.
| #define SONAR_SCALE SONAR_PWM_PERIOD |
Ranger scale or sensitivity as you wish.
Definition at line 78 of file sonar_pwm.c.
Definition at line 109 of file sonar_pwm.c.
References init_median_filter_f(), SonarPwm::offset, SonarPwm::raw, SonarPwm::scale, sonar_filt, SONAR_MEDIAN_SIZE, SONAR_OFFSET, sonar_pwm, and SONAR_SCALE.
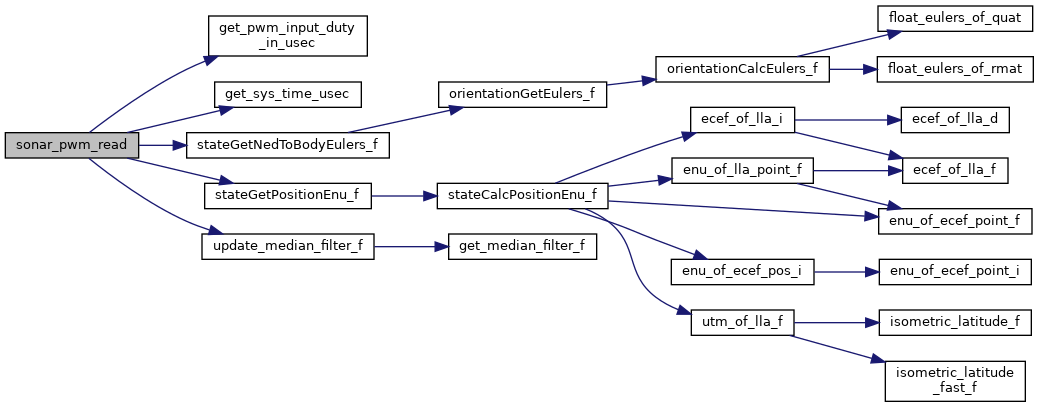
Here is the call graph for this function:Definition at line 120 of file sonar_pwm.c.
References AGL_SONAR_PWM_ID, DefaultChannel, DefaultDevice, SonarADC::distance, SonarPwm::distance, foo, get_pwm_input_duty_in_usec(), get_sys_time_usec(), SonarPwm::offset, FloatEulers::phi, SonarPwm::raw, SonarPwm::scale, sonar_adc, sonar_filt, SONAR_MAX_RANGE, SONAR_MIN_RANGE, sonar_pwm, SONAR_PWM_OFFSET, stateGetNedToBodyEulers_f(), stateGetPositionEnu_f(), FloatEulers::theta, update_median_filter_f(), and EnuCoor_f::z.
Here is the call graph for this function:| struct SonarPwm sonar_pwm |
Definition at line 106 of file sonar_pwm.c.
Referenced by sonar_pwm_init(), and sonar_pwm_read().