|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Multiplicative linearized Kalman Filter in quaternion formulation. More...
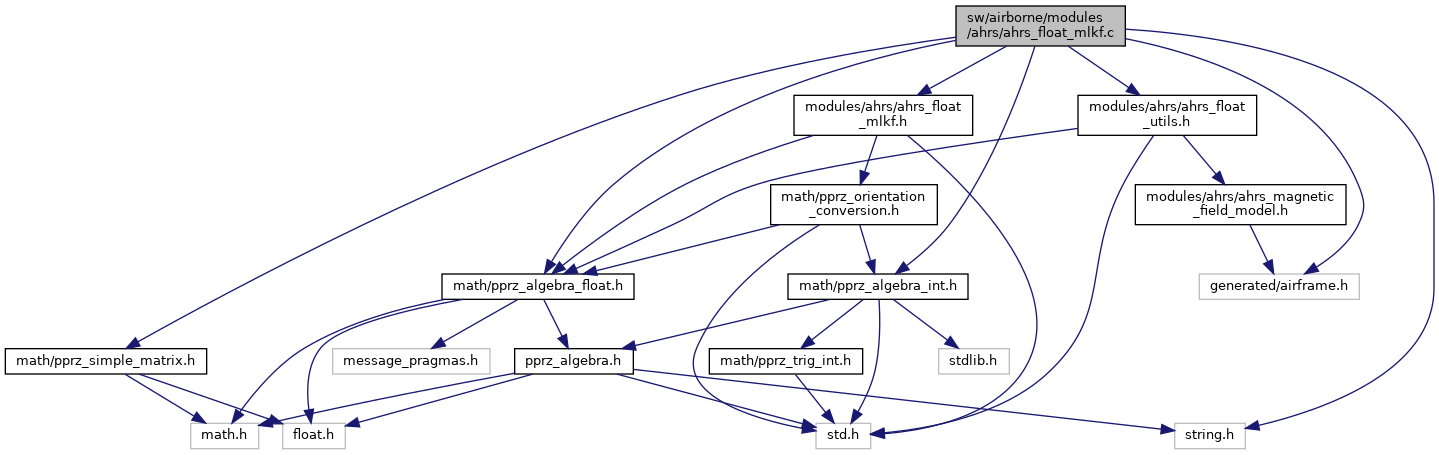
#include "modules/ahrs/ahrs_float_mlkf.h"#include "modules/ahrs/ahrs_float_utils.h"#include <string.h>#include "math/pprz_algebra_float.h"#include "math/pprz_algebra_int.h"#include "math/pprz_simple_matrix.h"#include "generated/airframe.h" Include dependency graph for ahrs_float_mlkf.c:
Include dependency graph for ahrs_float_mlkf.c:Go to the source code of this file.
Macros | |
| #define | AHRS_MAG_NOISE_X 0.2 |
| #define | AHRS_MAG_NOISE_Y 0.2 |
| #define | AHRS_MAG_NOISE_Z 0.2 |
Functions | |
| static void | propagate_ref (struct FloatRates *gyro, float dt) |
| static void | propagate_state (float dt) |
| Progagate filter's covariance We don't propagate state as we assume to have reseted. | |
| static void | update_state (const struct FloatVect3 *i_expected, struct FloatVect3 *b_measured, struct FloatVect3 *noise) |
| Incorporate one 3D vector measurement. | |
| static void | update_state_heading (const struct FloatVect3 *i_expected, struct FloatVect3 *b_measured, struct FloatVect3 *noise) |
| Incorporate one 3D vector measurement, only correcting heading. | |
| static void | reset_state (void) |
| Incorporate errors to reference and zeros state. | |
| void | ahrs_mlkf_init (void) |
| bool | ahrs_mlkf_align (struct FloatRates *lp_gyro, struct FloatVect3 *lp_accel, struct FloatVect3 *lp_mag) |
| void | ahrs_mlkf_propagate (struct FloatRates *gyro, float dt) |
| void | ahrs_mlkf_update_accel (struct FloatVect3 *accel) |
| void | ahrs_mlkf_update_mag (struct FloatVect3 *mag) |
| void | ahrs_mlkf_update_mag_2d (struct FloatVect3 *mag) |
| void | ahrs_mlkf_update_mag_full (struct FloatVect3 *mag) |
Variables | |
| struct AhrsMlkf | ahrs_mlkf |
Multiplicative linearized Kalman Filter in quaternion formulation.
Estimate the attitude, heading and gyro bias.
Definition in file ahrs_float_mlkf.c.
| #define AHRS_MAG_NOISE_X 0.2 |
Definition at line 44 of file ahrs_float_mlkf.c.
| #define AHRS_MAG_NOISE_Y 0.2 |
Definition at line 45 of file ahrs_float_mlkf.c.
| #define AHRS_MAG_NOISE_Z 0.2 |
Definition at line 46 of file ahrs_float_mlkf.c.
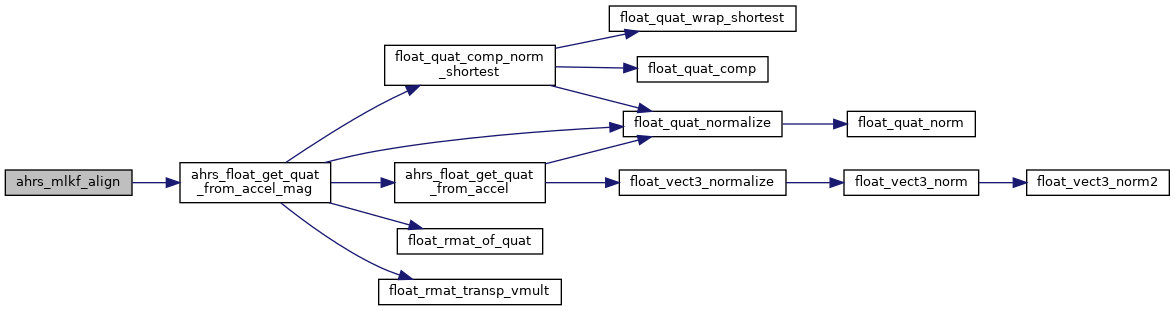
| bool ahrs_mlkf_align | ( | struct FloatRates * | lp_gyro, |
| struct FloatVect3 * | lp_accel, | ||
| struct FloatVect3 * | lp_mag | ||
| ) |
Definition at line 91 of file ahrs_float_mlkf.c.
References ahrs_float_get_quat_from_accel_mag(), ahrs_mlkf, AhrsMlkf::gyro_bias, AhrsMlkf::is_aligned, AhrsMlkf::lp_accel, and AhrsMlkf::ltp_to_body_quat.
Referenced by aligner_cb().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 62 of file ahrs_float_mlkf.c.
References AHRS_MAG_NOISE_X, AHRS_MAG_NOISE_Y, AHRS_MAG_NOISE_Z, ahrs_mlkf, AhrsMlkf::body_rate, float_quat_identity(), FLOAT_RATES_ZERO, foo, AhrsMlkf::gyro_bias, AhrsMlkf::is_aligned, AhrsMlkf::ltp_to_body_quat, AhrsMlkf::mag_h, AhrsMlkf::mag_noise, AhrsMlkf::P, and VECT3_ASSIGN.
Referenced by ahrs_mlkf_wrapper_init().
Here is the call graph for this function: Here is the caller graph for this function:| void ahrs_mlkf_propagate | ( | struct FloatRates * | gyro, |
| float | dt | ||
| ) |
Definition at line 106 of file ahrs_float_mlkf.c.
References propagate_ref(), and propagate_state().
Referenced by gyro_cb().
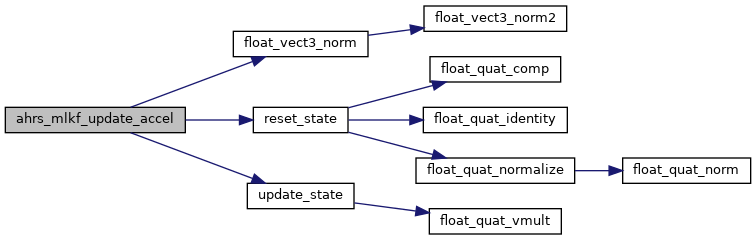
Here is the call graph for this function: Here is the caller graph for this function:| void ahrs_mlkf_update_accel | ( | struct FloatVect3 * | accel | ) |
Definition at line 112 of file ahrs_float_mlkf.c.
References ahrs_mlkf, alpha, dn, float_vect3_norm(), foo, AhrsMlkf::lp_accel, reset_state(), and update_state().
Referenced by accel_cb().
Here is the call graph for this function: Here is the caller graph for this function:| void ahrs_mlkf_update_mag | ( | struct FloatVect3 * | mag | ) |
Definition at line 125 of file ahrs_float_mlkf.c.
References ahrs_mlkf_update_mag_2d(), and ahrs_mlkf_update_mag_full().
Referenced by mag_cb().
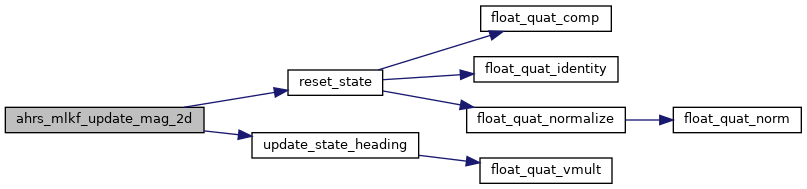
Here is the call graph for this function: Here is the caller graph for this function:| void ahrs_mlkf_update_mag_2d | ( | struct FloatVect3 * | mag | ) |
Definition at line 134 of file ahrs_float_mlkf.c.
References ahrs_mlkf, AhrsMlkf::mag_h, AhrsMlkf::mag_noise, reset_state(), and update_state_heading().
Referenced by ahrs_mlkf_update_mag().
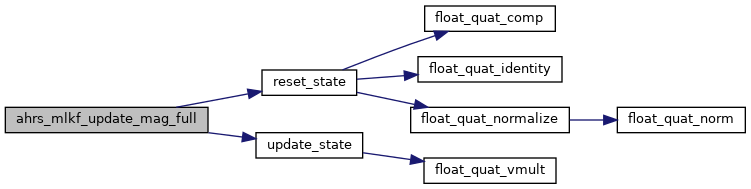
Here is the call graph for this function: Here is the caller graph for this function:| void ahrs_mlkf_update_mag_full | ( | struct FloatVect3 * | mag | ) |
Definition at line 140 of file ahrs_float_mlkf.c.
References ahrs_mlkf, AhrsMlkf::mag_h, AhrsMlkf::mag_noise, reset_state(), and update_state().
Referenced by ahrs_mlkf_update_mag().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Definition at line 147 of file ahrs_float_mlkf.c.
References ahrs_mlkf, alpha, AhrsMlkf::body_rate, float_quat_integrate(), FLOAT_RATES_LIN_CMB, AhrsMlkf::gyro_bias, AhrsMlkf::ltp_to_body_quat, RATES_COPY, and RATES_SUB.
Referenced by ahrs_mlkf_propagate().
Here is the call graph for this function: Here is the caller graph for this function:Progagate filter's covariance We don't propagate state as we assume to have reseted.
Definition at line 172 of file ahrs_float_mlkf.c.
References ahrs_mlkf, AhrsMlkf::body_rate, foo, MAT_MUL, MAT_MUL_T, FloatRates::p, AhrsMlkf::P, FloatRates::q, and FloatRates::r.
Referenced by ahrs_mlkf_propagate().
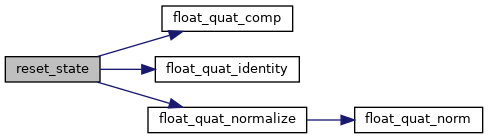
Here is the caller graph for this function:Incorporate errors to reference and zeros state.
Definition at line 341 of file ahrs_float_mlkf.c.
References ahrs_mlkf, float_quat_comp(), float_quat_identity(), float_quat_normalize(), foo, AhrsMlkf::gibbs_cor, AhrsMlkf::ltp_to_body_quat, and FloatQuat::qi.
Referenced by ahrs_mlkf_update_accel(), ahrs_mlkf_update_mag_2d(), and ahrs_mlkf_update_mag_full().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Incorporate one 3D vector measurement.
| i_expected | expected 3d vector in inertial frame |
| b_measured | measured 3d vector in body/imu frame |
| noise | measurement noise vector (diagonal of covariance) |
Definition at line 206 of file ahrs_float_mlkf.c.
References ahrs_mlkf, float_quat_vmult(), foo, AhrsMlkf::gibbs_cor, AhrsMlkf::gyro_bias, H, K, AhrsMlkf::ltp_to_body_quat, MAT_INV33, MAT_MUL, MAT_MUL_T, MAT_SUB, FloatRates::p, AhrsMlkf::P, FloatRates::q, FloatQuat::qx, FloatQuat::qy, FloatQuat::qz, FloatRates::r, VECT3_DIFF, FloatVect3::x, FloatVect3::y, and FloatVect3::z.
Referenced by ahrs_mlkf_update_accel(), and ahrs_mlkf_update_mag_full().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Incorporate one 3D vector measurement, only correcting heading.
| i_expected | expected 3d vector in inertial frame |
| b_measured | measured 3d vector in body/imu frame |
| noise | measurement noise vector (diagonal of covariance) TODO: optimize |
Definition at line 274 of file ahrs_float_mlkf.c.
References ahrs_mlkf, float_quat_vmult(), foo, AhrsMlkf::gibbs_cor, AhrsMlkf::gyro_bias, H, K, AhrsMlkf::ltp_to_body_quat, MAT_INV33, MAT_MUL, MAT_MUL_T, MAT_SUB, FloatRates::p, AhrsMlkf::P, FloatRates::q, FloatQuat::qx, FloatQuat::qy, FloatQuat::qz, FloatRates::r, VECT3_DIFF, FloatVect3::x, FloatVect3::y, and FloatVect3::z.
Referenced by ahrs_mlkf_update_mag_2d().
Here is the call graph for this function: Here is the caller graph for this function:| struct AhrsMlkf ahrs_mlkf |
Definition at line 59 of file ahrs_float_mlkf.c.
Referenced by accel_cb(), ahrs_mlkf_align(), ahrs_mlkf_init(), ahrs_mlkf_update_accel(), ahrs_mlkf_update_mag_2d(), ahrs_mlkf_update_mag_full(), aligner_cb(), geo_mag_cb(), gyro_cb(), mag_cb(), propagate_ref(), propagate_state(), reset_state(), send_bias(), send_euler(), send_filter_status(), send_geo_mag(), set_body_state_from_quat(), update_state(), and update_state_heading().