|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Multiplicative linearized Kalman Filter in quaternion formulation. More...
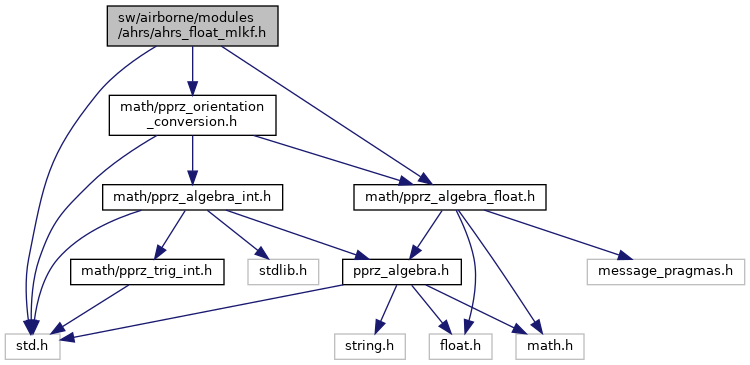
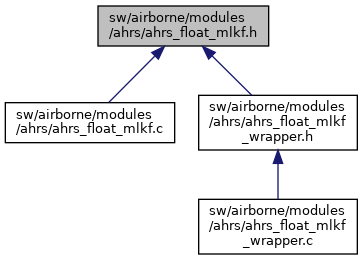
 Include dependency graph for ahrs_float_mlkf.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for ahrs_float_mlkf.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | AhrsMlkf |
Enumerations | |
| enum | AhrsMlkfStatus { AHRS_MLKF_UNINIT , AHRS_MLKF_RUNNING } |
Functions | |
| void | ahrs_mlkf_init (void) |
| bool | ahrs_mlkf_align (struct FloatRates *lp_gyro, struct FloatVect3 *lp_accel, struct FloatVect3 *lp_mag) |
| void | ahrs_mlkf_propagate (struct FloatRates *gyro, float dt) |
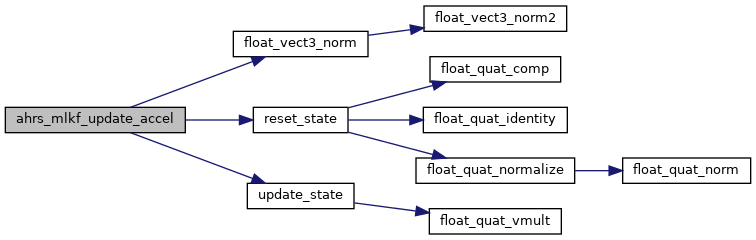
| void | ahrs_mlkf_update_accel (struct FloatVect3 *accel) |
| void | ahrs_mlkf_update_mag (struct FloatVect3 *mag) |
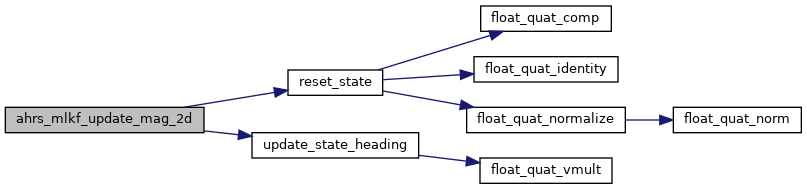
| void | ahrs_mlkf_update_mag_2d (struct FloatVect3 *mag) |
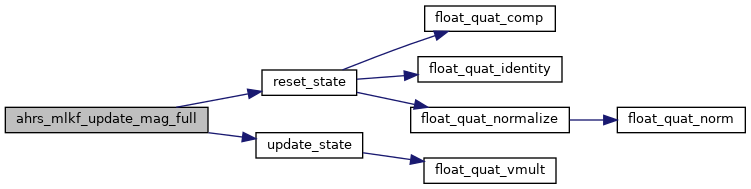
| void | ahrs_mlkf_update_mag_full (struct FloatVect3 *mag) |
Variables | |
| struct AhrsMlkf | ahrs_mlkf |
Multiplicative linearized Kalman Filter in quaternion formulation.
Estimate the attitude, heading and gyro bias.
Definition in file ahrs_float_mlkf.h.
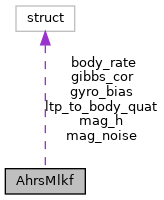
| struct AhrsMlkf |
Definition at line 43 of file ahrs_float_mlkf.h.
Collaboration diagram for AhrsMlkf:| Data Fields | ||
|---|---|---|
| struct FloatRates | body_rate | Rotational velocity in body frame. |
| struct FloatQuat | gibbs_cor | |
| struct FloatRates | gyro_bias | |
| bool | is_aligned | |
| float | lp_accel | |
| struct FloatQuat | ltp_to_body_quat | Rotation from LocalTangentPlane to body frame as unit quaternion. |
| struct FloatVect3 | mag_h | |
| struct FloatVect3 | mag_noise | |
| float | P[6][6] | |
| enum AhrsMlkfStatus | status | |
| Enumerator | |
|---|---|
| AHRS_MLKF_UNINIT | |
| AHRS_MLKF_RUNNING | |
Definition at line 38 of file ahrs_float_mlkf.h.
|
extern |
Definition at line 91 of file ahrs_float_mlkf.c.
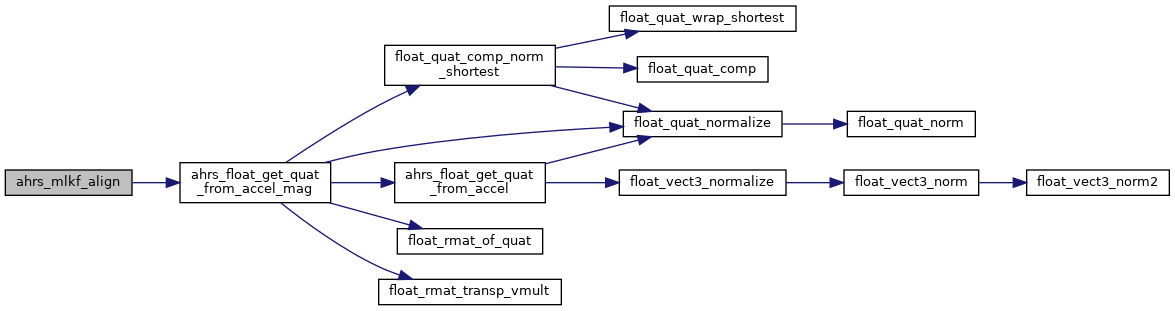
References ahrs_float_get_quat_from_accel_mag(), ahrs_mlkf, AhrsMlkf::gyro_bias, AhrsMlkf::is_aligned, AhrsMlkf::lp_accel, and AhrsMlkf::ltp_to_body_quat.
Referenced by aligner_cb().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 62 of file ahrs_float_mlkf.c.
References AHRS_MAG_NOISE_X, AHRS_MAG_NOISE_Y, AHRS_MAG_NOISE_Z, ahrs_mlkf, AhrsMlkf::body_rate, float_quat_identity(), FLOAT_RATES_ZERO, foo, AhrsMlkf::gyro_bias, AhrsMlkf::is_aligned, AhrsMlkf::ltp_to_body_quat, AhrsMlkf::mag_h, AhrsMlkf::mag_noise, AhrsMlkf::P, and VECT3_ASSIGN.
Referenced by ahrs_mlkf_wrapper_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Definition at line 106 of file ahrs_float_mlkf.c.
References propagate_ref(), and propagate_state().
Referenced by gyro_cb().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Definition at line 112 of file ahrs_float_mlkf.c.
References ahrs_mlkf, alpha, dn, float_vect3_norm(), foo, AhrsMlkf::lp_accel, reset_state(), and update_state().
Referenced by accel_cb().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Definition at line 125 of file ahrs_float_mlkf.c.
References ahrs_mlkf_update_mag_2d(), and ahrs_mlkf_update_mag_full().
Referenced by mag_cb().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Definition at line 134 of file ahrs_float_mlkf.c.
References ahrs_mlkf, AhrsMlkf::mag_h, AhrsMlkf::mag_noise, reset_state(), and update_state_heading().
Referenced by ahrs_mlkf_update_mag().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Definition at line 140 of file ahrs_float_mlkf.c.
References ahrs_mlkf, AhrsMlkf::mag_h, AhrsMlkf::mag_noise, reset_state(), and update_state().
Referenced by ahrs_mlkf_update_mag().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Definition at line 59 of file ahrs_float_mlkf.c.
Referenced by accel_cb(), ahrs_mlkf_align(), ahrs_mlkf_init(), ahrs_mlkf_update_accel(), ahrs_mlkf_update_mag_2d(), ahrs_mlkf_update_mag_full(), aligner_cb(), geo_mag_cb(), gyro_cb(), mag_cb(), propagate_ref(), propagate_state(), reset_state(), send_bias(), send_euler(), send_filter_status(), send_geo_mag(), set_body_state_from_quat(), update_state(), and update_state_heading().