|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
Horizontal filter (x,y) to estimate position and velocity. More...
#include "subsystems/ins/hf_float.h"#include "subsystems/imu.h"#include "state.h"#include "subsystems/gps.h"#include <stdlib.h>#include "filters/low_pass_filter.h"#include "generated/airframe.h"#include "subsystems/datalink/telemetry.h" Include dependency graph for hf_float.c:
Include dependency graph for hf_float.c:Go to the source code of this file.
Macros | |
| #define | PRINT_DBG(_l, _p) {} |
| #define | AHRS_PROPAGATE_FREQUENCY PERIODIC_FREQUENCY |
| #define | HFF_FREQ ((AHRS_PROPAGATE_FREQUENCY)/HFF_PRESCALER) |
| horizontal filter propagation frequency More... | |
| #define | DT_HFILTER (1./HFF_FREQ) |
| #define | INIT_PXX 1. |
| initial covariance diagonal More... | |
| #define | HFF_ACCEL_NOISE 0.5 |
| process noise (is the same for x and y) More... | |
| #define | Q HFF_ACCEL_NOISE*DT_HFILTER*DT_HFILTER/2. |
| #define | Qdotdot HFF_ACCEL_NOISE*DT_HFILTER |
| #define | HFF_R_POS 8. |
| #define | HFF_R_POS_MIN 3. |
| #define | HFF_R_SPEED 2. |
| #define | HFF_R_SPEED_MIN 1. |
| #define | HFF_UPDATE_SPEED TRUE |
| #define | HFF_LOWPASS_CUTOFF_FREQUENCY 14 |
| #define | SAVE_NOW 0 |
| #define | SAVING -1 |
| #define | SAVE_DONE -2 |
| #define | HFF_LOST_LIMIT 1000 |
Functions | |
| static void | b2_hff_init_x (float init_x, float init_xdot) |
| static void | b2_hff_init_y (float init_y, float init_ydot) |
| static void | b2_hff_propagate_x (struct HfilterFloat *hff_work, float dt) |
| static void | b2_hff_propagate_y (struct HfilterFloat *hff_work, float dt) |
| static void | b2_hff_update_x (struct HfilterFloat *hff_work, float x_meas, float Rpos) |
| static void | b2_hff_update_y (struct HfilterFloat *hff_work, float y_meas, float Rpos) |
| static void | b2_hff_update_xdot (struct HfilterFloat *hff_work, float vel, float Rvel) |
| static void | b2_hff_update_ydot (struct HfilterFloat *hff_work, float vel, float Rvel) |
| static void | send_hff (struct transport_tx *trans, struct link_device *dev) |
| static void | send_hff_debug (struct transport_tx *trans, struct link_device *dev) |
| void | b2_hff_init (float init_x, float init_xdot, float init_y, float init_ydot) |
| void | b2_hff_propagate (void) |
| void | b2_hff_update_gps (struct FloatVect2 *pos_ned, struct FloatVect2 *speed_ned) |
| void | b2_hff_realign (struct FloatVect2 pos, struct FloatVect2 vel) |
| void | b2_hff_update_pos (struct FloatVect2 pos, struct FloatVect2 Rpos) |
| void | b2_hff_update_vel (struct FloatVect2 vel, struct FloatVect2 Rvel) |
Variables | |
| Butterworth2LowPass_int | filter_x |
| Butterworth2LowPass_int | filter_y |
| Butterworth2LowPass_int | filter_z |
| float | Rgps_pos |
| float | Rgps_vel |
| struct HfilterFloat | b2_hff_state |
| static float | b2_hff_xdd_meas |
| static float | b2_hff_ydd_meas |
| static float | b2_hff_xd_meas |
| static float | b2_hff_yd_meas |
| static float | b2_hff_x_meas |
| static float | b2_hff_y_meas |
| static int | b2_hff_ps_counter |
| counter for hff propagation More... | |
| struct HfilterFloat * | b2_hff_rb_last |
| ringbuffer read pointer More... | |
| static int | b2_hff_rb_n |
| ringbuffer fill count More... | |
| static int16_t | lag_counter_err |
| by how many steps the estimated GPS validity point in time differed from GPS_LAG_N More... | |
| static int16_t | save_counter |
| counts down the propagation steps until the filter state is saved again More... | |
| static int | past_save_counter |
| static uint16_t | b2_hff_lost_limit |
| static uint16_t | b2_hff_lost_counter |
Horizontal filter (x,y) to estimate position and velocity.
Definition in file hf_float.c.
| #define AHRS_PROPAGATE_FREQUENCY PERIODIC_FREQUENCY |
Definition at line 51 of file hf_float.c.
Referenced by b2_hff_init(), and gyro_cb().
| #define DT_HFILTER (1./HFF_FREQ) |
Definition at line 66 of file hf_float.c.
Referenced by b2_hff_init(), and b2_hff_propagate().
| #define HFF_ACCEL_NOISE 0.5 |
process noise (is the same for x and y)
Definition at line 72 of file hf_float.c.
| #define HFF_FREQ ((AHRS_PROPAGATE_FREQUENCY)/HFF_PRESCALER) |
horizontal filter propagation frequency
Definition at line 65 of file hf_float.c.
| #define HFF_LOST_LIMIT 1000 |
Definition at line 205 of file hf_float.c.
Referenced by b2_hff_init().
| #define HFF_LOWPASS_CUTOFF_FREQUENCY 14 |
Definition at line 97 of file hf_float.c.
Referenced by b2_hff_init().
| #define HFF_R_POS 8. |
Definition at line 79 of file hf_float.c.
Referenced by b2_hff_init().
| #define HFF_R_POS_MIN 3. |
Definition at line 82 of file hf_float.c.
Referenced by b2_hff_update_gps().
| #define HFF_R_SPEED 2. |
Definition at line 86 of file hf_float.c.
Referenced by b2_hff_init().
| #define HFF_R_SPEED_MIN 1. |
Definition at line 89 of file hf_float.c.
Referenced by b2_hff_update_gps().
| #define HFF_UPDATE_SPEED TRUE |
Definition at line 93 of file hf_float.c.
| #define INIT_PXX 1. |
initial covariance diagonal
Definition at line 69 of file hf_float.c.
Referenced by b2_hff_init_x(), and b2_hff_init_y().
| #define PRINT_DBG | ( | _l, | |
| _p | |||
| ) | {} |
Definition at line 46 of file hf_float.c.
Referenced by b2_hff_propagate(), and b2_hff_update_gps().
| #define Q HFF_ACCEL_NOISE*DT_HFILTER*DT_HFILTER/2. |
Definition at line 74 of file hf_float.c.
Referenced by b2_hff_propagate_x(), b2_hff_propagate_y(), kalman_filter_linear_2D_float(), lla_of_ecef_d(), and lla_of_ecef_f().
| #define Qdotdot HFF_ACCEL_NOISE*DT_HFILTER |
Definition at line 75 of file hf_float.c.
Referenced by b2_hff_propagate_x(), and b2_hff_propagate_y().
| #define SAVE_DONE -2 |
Definition at line 203 of file hf_float.c.
Referenced by b2_hff_init(), and b2_hff_realign().
| #define SAVE_NOW 0 |
Definition at line 201 of file hf_float.c.
| #define SAVING -1 |
Definition at line 202 of file hf_float.c.
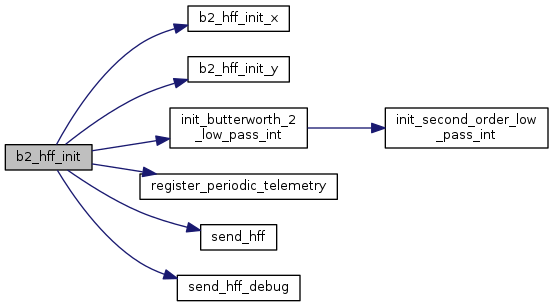
| void b2_hff_init | ( | float | init_x, |
| float | init_xdot, | ||
| float | init_y, | ||
| float | init_ydot | ||
| ) |
Definition at line 268 of file hf_float.c.
References AHRS_PROPAGATE_FREQUENCY, b2_hff_init_x(), b2_hff_init_y(), b2_hff_lost_counter, b2_hff_lost_limit, b2_hff_ps_counter, b2_hff_rb_n, b2_hff_state, DefaultPeriodic, DT_HFILTER, HFF_LOST_LIMIT, HFF_LOWPASS_CUTOFF_FREQUENCY, HFF_R_POS, HFF_R_SPEED, init_butterworth_2_low_pass_int(), HfilterFloat::lag_counter, lag_counter_err, past_save_counter, register_periodic_telemetry(), Rgps_pos, Rgps_vel, HfilterFloat::rollback, save_counter, SAVE_DONE, send_hff(), and send_hff_debug().
Referenced by ins_int_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 317 of file hf_float.c.
References b2_hff_state, HFF_STATE_SIZE, INIT_PXX, HfilterFloat::x, HfilterFloat::xdot, and HfilterFloat::xP.
Referenced by b2_hff_init().
Here is the caller graph for this function:
|
static |
Definition at line 330 of file hf_float.c.
References b2_hff_state, HFF_STATE_SIZE, INIT_PXX, HfilterFloat::y, HfilterFloat::ydot, and HfilterFloat::yP.
Referenced by b2_hff_init().
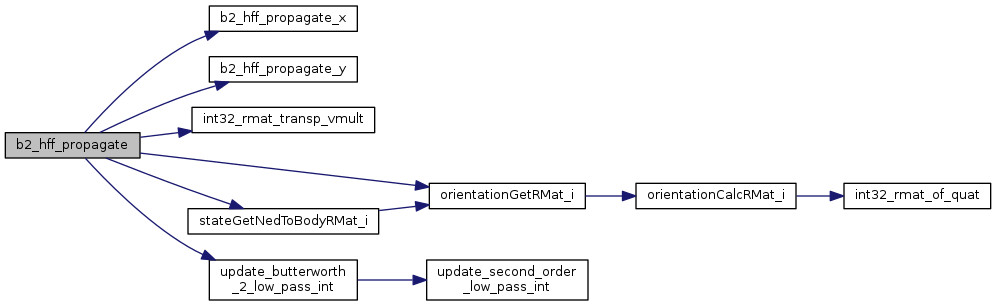
Here is the caller graph for this function:| void b2_hff_propagate | ( | void | ) |
Definition at line 470 of file hf_float.c.
References Imu::accel, ACCEL_FLOAT_OF_BFP, b2_hff_lost_counter, b2_hff_lost_limit, b2_hff_propagate_x(), b2_hff_propagate_y(), b2_hff_ps_counter, b2_hff_rb_n, b2_hff_state, b2_hff_xdd_meas, b2_hff_ydd_meas, Imu::body_to_imu, DT_HFILTER, imu, int32_rmat_transp_vmult(), HfilterFloat::lag_counter, orientationGetRMat_i(), PRINT_DBG, HfilterFloat::rollback, save_counter, stateGetNedToBodyRMat_i(), update_butterworth_2_low_pass_int(), Int32Vect3::x, Int32Vect3::y, and Int32Vect3::z.
Referenced by ins_int_propagate().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 629 of file hf_float.c.
References b2_hff_xdd_meas, Q, Qdotdot, HfilterFloat::x, HfilterFloat::xdot, HfilterFloat::xdotdot, and HfilterFloat::xP.
Referenced by b2_hff_propagate().
Here is the caller graph for this function:
|
static |
Definition at line 647 of file hf_float.c.
References b2_hff_ydd_meas, Q, Qdotdot, HfilterFloat::y, HfilterFloat::ydot, HfilterFloat::ydotdot, and HfilterFloat::yP.
Referenced by b2_hff_propagate().
Here is the caller graph for this function:| void b2_hff_realign | ( | struct FloatVect2 | pos, |
| struct FloatVect2 | vel | ||
| ) |
Definition at line 594 of file hf_float.c.
References b2_hff_rb_n, b2_hff_state, past_save_counter, save_counter, SAVE_DONE, HfilterFloat::x, FloatVect2::x, HfilterFloat::xdot, HfilterFloat::y, FloatVect2::y, and HfilterFloat::ydot.
Referenced by ins_int_update_gps().
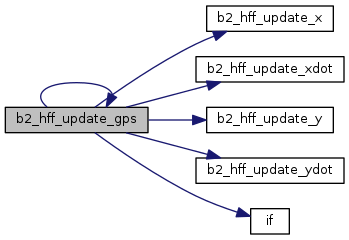
Here is the caller graph for this function:| void b2_hff_update_gps | ( | struct FloatVect2 * | pos_ned, |
| struct FloatVect2 * | speed_ned | ||
| ) |
Definition at line 532 of file hf_float.c.
References b2_hff_lost_counter, b2_hff_rb_n, b2_hff_state, b2_hff_update_gps(), b2_hff_update_x(), b2_hff_update_xdot(), b2_hff_update_y(), b2_hff_update_ydot(), gps, HFF_R_POS_MIN, HFF_R_SPEED_MIN, if(), HfilterFloat::lag_counter, lag_counter_err, GpsState::pacc, past_save_counter, PRINT_DBG, Rgps_pos, Rgps_vel, HfilterFloat::rollback, GpsState::sacc, save_counter, FloatVect2::x, and FloatVect2::y.
Referenced by b2_hff_update_gps(), and ins_int_update_gps().
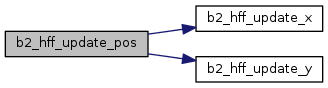
Here is the call graph for this function: Here is the caller graph for this function:| void b2_hff_update_pos | ( | struct FloatVect2 | pos, |
| struct FloatVect2 | Rpos | ||
| ) |
Definition at line 685 of file hf_float.c.
References b2_hff_state, b2_hff_update_x(), b2_hff_update_y(), FloatVect2::x, and FloatVect2::y.
Here is the call graph for this function:| void b2_hff_update_vel | ( | struct FloatVect2 | vel, |
| struct FloatVect2 | Rvel | ||
| ) |
Definition at line 757 of file hf_float.c.
References b2_hff_state, b2_hff_update_xdot(), b2_hff_update_ydot(), FloatVect2::x, and FloatVect2::y.
Referenced by vel_est_cb().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 691 of file hf_float.c.
References b2_hff_x_meas, HfilterFloat::x, HfilterFloat::xdot, and HfilterFloat::xP.
Referenced by b2_hff_update_gps(), and b2_hff_update_pos().
Here is the caller graph for this function:
|
static |
Definition at line 763 of file hf_float.c.
References b2_hff_xd_meas, HfilterFloat::x, HfilterFloat::xdot, and HfilterFloat::xP.
Referenced by b2_hff_update_gps(), and b2_hff_update_vel().
Here is the caller graph for this function:
|
static |
Definition at line 714 of file hf_float.c.
References b2_hff_y_meas, HfilterFloat::y, HfilterFloat::ydot, and HfilterFloat::yP.
Referenced by b2_hff_update_gps(), and b2_hff_update_pos().
Here is the caller graph for this function:
|
static |
Definition at line 786 of file hf_float.c.
References b2_hff_yd_meas, HfilterFloat::y, HfilterFloat::ydot, and HfilterFloat::yP.
Referenced by b2_hff_update_gps(), and b2_hff_update_vel().
Here is the caller graph for this function:
|
static |
Definition at line 232 of file hf_float.c.
References b2_hff_state, HfilterFloat::x, HfilterFloat::xdot, HfilterFloat::xdotdot, HfilterFloat::y, HfilterFloat::ydot, and HfilterFloat::ydotdot.
Referenced by b2_hff_init().
Here is the caller graph for this function:
|
static |
Definition at line 243 of file hf_float.c.
References b2_hff_state, b2_hff_x_meas, b2_hff_xd_meas, b2_hff_y_meas, b2_hff_yd_meas, HfilterFloat::xP, and HfilterFloat::yP.
Referenced by b2_hff_init().
Here is the caller graph for this function:
|
static |
Definition at line 207 of file hf_float.c.
Referenced by b2_hff_init(), b2_hff_propagate(), and b2_hff_update_gps().
|
static |
Definition at line 206 of file hf_float.c.
Referenced by b2_hff_init(), and b2_hff_propagate().
|
static |
counter for hff propagation
Definition at line 136 of file hf_float.c.
Referenced by b2_hff_init(), and b2_hff_propagate().
| struct HfilterFloat* b2_hff_rb_last |
ringbuffer read pointer
Definition at line 191 of file hf_float.c.
|
static |
ringbuffer fill count
Definition at line 192 of file hf_float.c.
Referenced by b2_hff_init(), b2_hff_propagate(), b2_hff_realign(), and b2_hff_update_gps().
| struct HfilterFloat b2_hff_state |
Definition at line 120 of file hf_float.c.
Referenced by b2_hff_init(), b2_hff_init_x(), b2_hff_init_y(), b2_hff_propagate(), b2_hff_realign(), b2_hff_update_gps(), b2_hff_update_pos(), b2_hff_update_vel(), send_hff(), and send_hff_debug().
|
static |
Definition at line 132 of file hf_float.c.
Referenced by b2_hff_update_x(), and send_hff_debug().
|
static |
Definition at line 128 of file hf_float.c.
Referenced by b2_hff_update_xdot(), and send_hff_debug().
|
static |
Definition at line 124 of file hf_float.c.
Referenced by b2_hff_propagate(), and b2_hff_propagate_x().
|
static |
Definition at line 133 of file hf_float.c.
Referenced by b2_hff_update_y(), and send_hff_debug().
|
static |
Definition at line 129 of file hf_float.c.
Referenced by b2_hff_update_ydot(), and send_hff_debug().
|
static |
Definition at line 125 of file hf_float.c.
Referenced by b2_hff_propagate(), and b2_hff_propagate_y().
| Butterworth2LowPass_int filter_x |
Definition at line 105 of file hf_float.c.
| Butterworth2LowPass_int filter_y |
Definition at line 106 of file hf_float.c.
| Butterworth2LowPass_int filter_z |
Definition at line 107 of file hf_float.c.
|
static |
by how many steps the estimated GPS validity point in time differed from GPS_LAG_N
Definition at line 196 of file hf_float.c.
Referenced by b2_hff_init(), and b2_hff_update_gps().
|
static |
Definition at line 200 of file hf_float.c.
Referenced by b2_hff_init(), b2_hff_realign(), and b2_hff_update_gps().
| float Rgps_pos |
Definition at line 110 of file hf_float.c.
Referenced by b2_hff_init(), and b2_hff_update_gps().
| float Rgps_vel |
Definition at line 110 of file hf_float.c.
Referenced by b2_hff_init(), and b2_hff_update_gps().
|
static |
counts down the propagation steps until the filter state is saved again
Definition at line 199 of file hf_float.c.
Referenced by b2_hff_init(), b2_hff_propagate(), b2_hff_realign(), and b2_hff_update_gps().
 1.8.8
1.8.8