|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
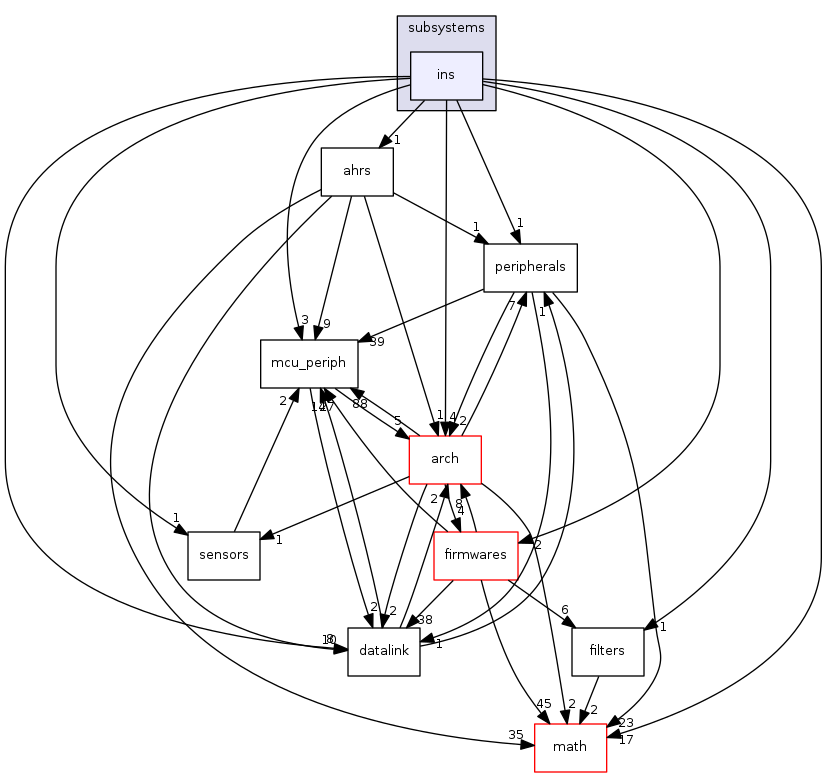
 Directory dependency graph for ins:
Directory dependency graph for ins:Files | |
| file | hf_float.c [code] |
| Horizontal filter (x,y) to estimate position and velocity. | |
| file | hf_float.h [code] |
| Horizontal filter (x,y) to estimate position and velocity. | |
| file | ins_alt_float.c [code] |
| Filters altitude and climb rate for fixedwings. | |
| file | ins_alt_float.h [code] |
| Filters altitude and climb rate for fixedwings. | |
| file | ins_float_invariant.c [code] |
| file | ins_float_invariant.h [code] |
| INS using invariant filter. | |
| file | ins_float_invariant_wrapper.c [code] |
| Paparazzi specific wrapper to run INVARIANT filter. | |
| file | ins_float_invariant_wrapper.h [code] |
| Paparazzi specific wrapper to run INVARIANT filter. | |
| file | ins_gps_passthrough.c [code] |
| Simply converts GPS ECEF position and velocity to NED and passes it through to the state interface. | |
| file | ins_gps_passthrough.h [code] |
| Simply passes GPS through to the state interface. | |
| file | ins_gps_passthrough_utm.c [code] |
| Simply passes GPS UTM position and velocity through to the state interface. | |
| file | ins_int.c [code] |
| INS for rotorcrafts combining vertical and horizontal filters. | |
| file | ins_int.h [code] |
| INS for rotorcrafts combining vertical and horizontal filters. | |
| file | ins_vectornav.c [code] |
| Vectornav VN-200 INS subsystem. | |
| file | ins_vectornav.h [code] |
| Vectornav VN-200 INS subsystem. | |
| file | ins_vectornav_wrapper.c [code] |
| Vectornav VN-200 INS subsystem. | |
| file | ins_vectornav_wrapper.h [code] |
| Vectornav VN-200 INS subsystem. | |
| file | vf_extended_float.c [code] |
| Extended vertical filter (in float). | |
| file | vf_extended_float.h [code] |
| Interface for extended vertical filter (in float). | |
| file | vf_float.c [code] |
| Vertical filter (in float) estimating altitude, velocity and accel bias. | |
| file | vf_float.h [code] |
| Vertical filter (in float) estimating altitude, velocity and accel bias. | |
 1.8.8
1.8.8