|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
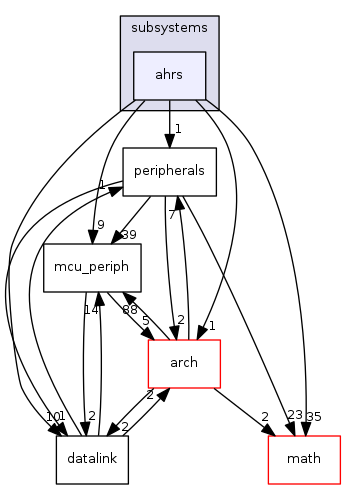
 Directory dependency graph for ahrs:
Directory dependency graph for ahrs:Files | |
| file | ahrs_aligner.c [code] |
| Low-pass IMU measurements at startup to align the AHRS. | |
| file | ahrs_aligner.h [code] |
| Interface to align the AHRS via low-passed measurements at startup. | |
| file | ahrs_float_cmpl.c [code] |
| Complementary filter in float to estimate the attitude, heading and gyro bias. | |
| file | ahrs_float_cmpl.h [code] |
| Complementary filter in float to estimate the attitude, heading and gyro bias. | |
| file | ahrs_float_cmpl_wrapper.c [code] |
| Paparazzi specific wrapper to run floating point complementary filter. | |
| file | ahrs_float_cmpl_wrapper.h [code] |
| Paparazzi specific wrapper to run floating point complementary filter. | |
| file | ahrs_float_dcm.c [code] |
| Attitude estimation for fixedwings based on the DCM. | |
| file | ahrs_float_dcm.h [code] |
| Attitude estimation for fixedwings based on the DCM. | |
| file | ahrs_float_dcm_algebra.h [code] |
| Algebra helper functions for DCM. | |
| file | ahrs_float_dcm_wrapper.c [code] |
| Paparazzi specific wrapper to run floating point complementary filter. | |
| file | ahrs_float_dcm_wrapper.h [code] |
| Paparazzi specific wrapper to run floating point DCM filter. | |
| file | ahrs_float_invariant.c [code] |
| file | ahrs_float_invariant.h [code] |
| AHRS using invariant filter. | |
| file | ahrs_float_invariant_wrapper.c [code] |
| Paparazzi specific wrapper to run INVARIANT ahrs filter. | |
| file | ahrs_float_invariant_wrapper.h [code] |
| Paparazzi specific wrapper to run INVARIANT ahrs filter. | |
| file | ahrs_float_mlkf.c [code] |
| Multiplicative linearized Kalman Filter in quaternion formulation. | |
| file | ahrs_float_mlkf.h [code] |
| Multiplicative linearized Kalman Filter in quaternion formulation. | |
| file | ahrs_float_mlkf_wrapper.c [code] |
| Paparazzi specific wrapper to run MLKF filter. | |
| file | ahrs_float_mlkf_wrapper.h [code] |
| Paparazzi specific wrapper to run MLKF filter. | |
| file | ahrs_float_utils.h [code] |
| Utility functions for floating point AHRS implementations. | |
| file | ahrs_gx3.c [code] |
| Driver for Microstrain GX3 IMU/AHRS subsystem. | |
| file | ahrs_gx3.h [code] |
| Driver for Microstrain GX3 IMU/AHRS subsystem. | |
| file | ahrs_int_cmpl_euler.c [code] |
| Complementary filter in euler representation (fixed-point). | |
| file | ahrs_int_cmpl_euler.h [code] |
| Complementary filter in euler representation (fixed-point). | |
| file | ahrs_int_cmpl_euler_wrapper.c [code] |
| Paparazzi specific wrapper to run floating point complementary filter. | |
| file | ahrs_int_cmpl_euler_wrapper.h [code] |
| Paparazzi specific wrapper to run floating point DCM filter. | |
| file | ahrs_int_cmpl_quat.c [code] |
| Quaternion complementary filter (fixed-point). | |
| file | ahrs_int_cmpl_quat.h [code] |
| Quaternion complementary filter (fixed-point). | |
| file | ahrs_int_cmpl_quat_wrapper.c [code] |
| Paparazzi specific wrapper to run floating point complementary filter. | |
| file | ahrs_int_cmpl_quat_wrapper.h [code] |
| Paparazzi specific wrapper to run floating point complementary filter. | |
| file | ahrs_int_utils.h [code] |
| Utility functions for fixed point AHRS implementations. | |
| file | ahrs_magnetic_field_model.h [code] |
| file | ahrs_sim.c [code] |
| Dummy plug to set the AHRS from the simple OCaml simulator. | |
| file | ahrs_sim.h [code] |
| Interface to set the AHRS from the simple OCaml simulator. | |
| file | ahrs_vectornav.c [code] |
| file | ahrs_vectornav.h [code] |
| Vectornav VN-200 as AHRS. | |
| file | ahrs_vectornav_wrapper.c [code] |
| Vectornav VN-200 as AHRS. | |
| file | ahrs_vectornav_wrapper.h [code] |
| Vectornav VN-200 as AHRS. | |
 1.8.8
1.8.8