|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
Attitude estimation for fixedwings based on the DCM. More...
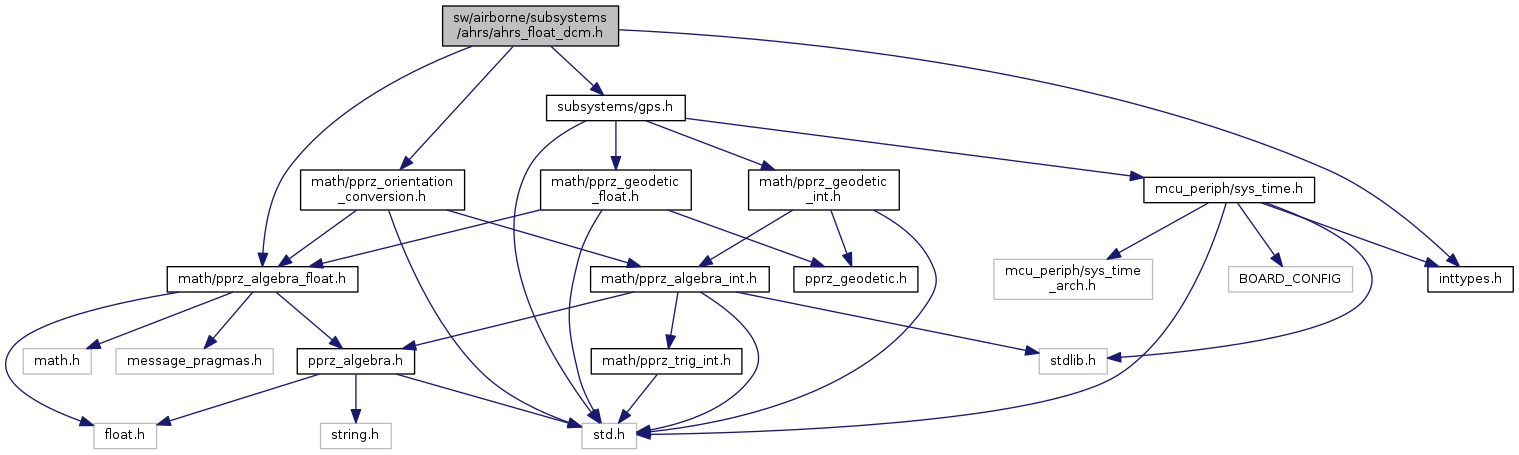
#include <inttypes.h>#include "math/pprz_algebra_float.h"#include "math/pprz_orientation_conversion.h"#include "subsystems/gps.h" Include dependency graph for ahrs_float_dcm.h: This graph shows which files directly or indirectly include this file:
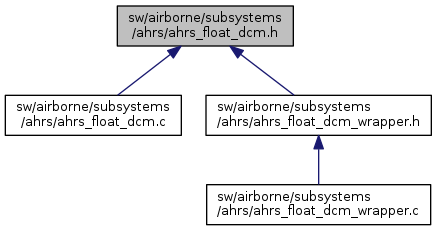
Include dependency graph for ahrs_float_dcm.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | AhrsFloatDCM |
Macros | |
| #define | Kp_ROLLPITCH 0.015 |
| #define | Ki_ROLLPITCH 0.000010 |
| #define | Kp_YAW 0.9 |
| #define | Ki_YAW 0.00005 |
| #define | GRAVITY 9.81 |
| #define | OUTPUTMODE 1 |
| #define | PERFORMANCE_REPORTING 1 |
Enumerations | |
| enum | AhrsDCMStatus { AHRS_DCM_UNINIT, AHRS_DCM_RUNNING } |
Functions | |
| void | ahrs_dcm_init (void) |
| void | ahrs_dcm_set_body_to_imu (struct OrientationReps *body_to_imu) |
| void | ahrs_dcm_set_body_to_imu_quat (struct FloatQuat *q_b2i) |
| bool | ahrs_dcm_align (struct FloatRates *lp_gyro, struct FloatVect3 *lp_accel, struct FloatVect3 *lp_mag) |
| void | ahrs_dcm_propagate (struct FloatRates *gyro, float dt) |
| void | ahrs_dcm_update_accel (struct FloatVect3 *accel) |
| void | ahrs_dcm_update_mag (struct FloatVect3 *mag) |
| void | ahrs_dcm_update_gps (struct GpsState *gps_s) |
Variables | |
| struct AhrsFloatDCM | ahrs_dcm |
| int | renorm_sqrt_count |
| int | renorm_blowup_count |
| float | imu_health |
Attitude estimation for fixedwings based on the DCM.
Theory: http://code.google.com/p/gentlenav/downloads/list file DCMDraft2.pdf
Definition in file ahrs_float_dcm.h.
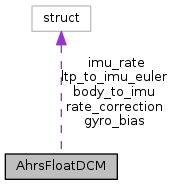
| struct AhrsFloatDCM |
Definition at line 37 of file ahrs_float_dcm.h.
Collaboration diagram for AhrsFloatDCM:| Data Fields | ||
|---|---|---|
| struct OrientationReps | body_to_imu | |
| float | gps_acceleration | |
| uint8_t | gps_age | |
| float | gps_course | |
| bool | gps_course_valid | |
| float | gps_speed | |
| struct FloatRates | gyro_bias | |
| struct FloatRates | imu_rate | |
| bool | is_aligned | |
| struct FloatEulers | ltp_to_imu_euler | |
| struct FloatRates | rate_correction | |
| enum AhrsDCMStatus | status | |
| #define GRAVITY 9.81 |
Definition at line 65 of file ahrs_float_dcm.h.
Referenced by compute_ahrs_representations(), and Drift_correction().
| #define Ki_ROLLPITCH 0.000010 |
Definition at line 61 of file ahrs_float_dcm.h.
Referenced by Drift_correction().
| #define Ki_YAW 0.00005 |
Definition at line 63 of file ahrs_float_dcm.h.
Referenced by Drift_correction().
| #define Kp_ROLLPITCH 0.015 |
Definition at line 60 of file ahrs_float_dcm.h.
Referenced by Drift_correction().
| #define Kp_YAW 0.9 |
Definition at line 62 of file ahrs_float_dcm.h.
Referenced by Drift_correction().
| #define OUTPUTMODE 1 |
Definition at line 69 of file ahrs_float_dcm.h.
| #define PERFORMANCE_REPORTING 1 |
Definition at line 76 of file ahrs_float_dcm.h.
| enum AhrsDCMStatus |
| Enumerator | |
|---|---|
| AHRS_DCM_UNINIT | |
| AHRS_DCM_RUNNING | |
Definition at line 32 of file ahrs_float_dcm.h.
| bool ahrs_dcm_align | ( | struct FloatRates * | lp_gyro, |
| struct FloatVect3 * | lp_accel, | ||
| struct FloatVect3 * | lp_mag | ||
| ) |
Definition at line 119 of file ahrs_float_dcm.c.
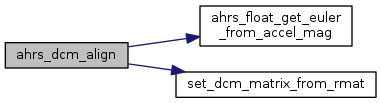
References ahrs_dcm, AHRS_DCM_RUNNING, ahrs_float_get_euler_from_accel_mag(), float_rmat_of_eulers, AhrsFloatDCM::gyro_bias, AhrsFloatDCM::is_aligned, AhrsFloatDCM::ltp_to_imu_euler, set_dcm_matrix_from_rmat(), and AhrsFloatDCM::status.
Referenced by aligner_cb().
Here is the call graph for this function: Here is the caller graph for this function:| void ahrs_dcm_init | ( | void | ) |
Definition at line 99 of file ahrs_float_dcm.c.
References ahrs_dcm, AHRS_DCM_UNINIT, AhrsFloatDCM::body_to_imu, FLOAT_EULERS_ZERO, FLOAT_RATES_ZERO, AhrsFloatDCM::gps_acceleration, AhrsFloatDCM::gps_age, AhrsFloatDCM::gps_course, AhrsFloatDCM::gps_course_valid, AhrsFloatDCM::gps_speed, AhrsFloatDCM::imu_rate, AhrsFloatDCM::is_aligned, AhrsFloatDCM::ltp_to_imu_euler, orientationGetRMat_f(), set_dcm_matrix_from_rmat(), and AhrsFloatDCM::status.
Referenced by ahrs_dcm_register().
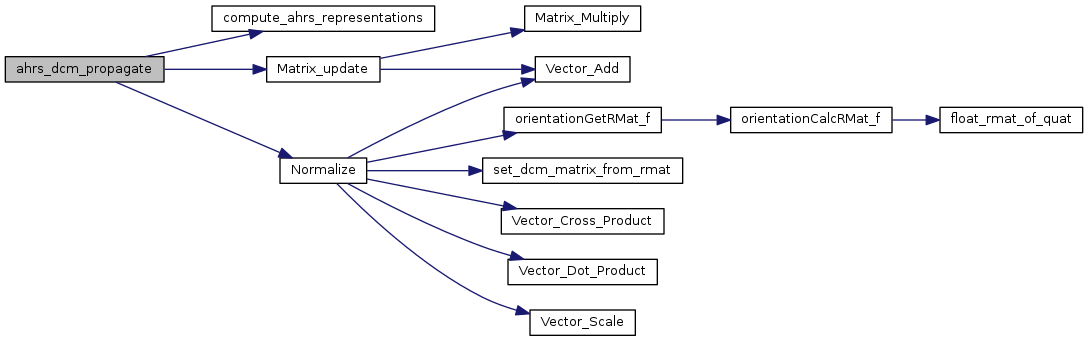
Here is the call graph for this function: Here is the caller graph for this function:| void ahrs_dcm_propagate | ( | struct FloatRates * | gyro, |
| float | dt | ||
| ) |
Definition at line 142 of file ahrs_float_dcm.c.
References ahrs_dcm, compute_ahrs_representations(), AhrsFloatDCM::gyro_bias, AhrsFloatDCM::imu_rate, Matrix_update(), Normalize(), FloatRates::p, FloatRates::q, FloatRates::r, and RATES_DIFF.
Referenced by gyro_cb().
Here is the call graph for this function: Here is the caller graph for this function:| void ahrs_dcm_set_body_to_imu | ( | struct OrientationReps * | body_to_imu | ) |
Definition at line 512 of file ahrs_float_dcm.c.
References ahrs_dcm_set_body_to_imu_quat(), and orientationGetQuat_f().
Here is the call graph for this function:| void ahrs_dcm_set_body_to_imu_quat | ( | struct FloatQuat * | q_b2i | ) |
Definition at line 517 of file ahrs_float_dcm.c.
References ahrs_dcm, AhrsFloatDCM::body_to_imu, AhrsFloatDCM::is_aligned, AhrsFloatDCM::ltp_to_imu_euler, orientationGetEulers_f(), and orientationSetQuat_f().
Referenced by ahrs_dcm_set_body_to_imu(), and body_to_imu_cb().
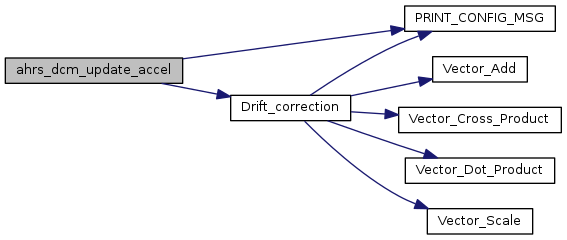
Here is the call graph for this function: Here is the caller graph for this function:| void ahrs_dcm_update_accel | ( | struct FloatVect3 * | accel | ) |
Definition at line 194 of file ahrs_float_dcm.c.
References ahrs_dcm, Drift_correction(), AhrsFloatDCM::gps_acceleration, AhrsFloatDCM::gps_age, AhrsFloatDCM::gps_speed, Omega, PRINT_CONFIG_MSG(), FloatVect3::x, FloatVect3::y, and FloatVect3::z.
Referenced by accel_cb().
Here is the call graph for this function: Here is the caller graph for this function:| void ahrs_dcm_update_gps | ( | struct GpsState * | gps_s | ) |
Definition at line 169 of file ahrs_float_dcm.c.
References ahrs_dcm, GpsState::course, GpsState::fix, AhrsFloatDCM::gps_acceleration, AhrsFloatDCM::gps_age, AhrsFloatDCM::gps_course, AhrsFloatDCM::gps_course_valid, GPS_FIX_3D, AhrsFloatDCM::gps_speed, GpsState::gspeed, and GpsState::speed_3d.
Referenced by gps_cb().
Here is the caller graph for this function:| void ahrs_dcm_update_mag | ( | struct FloatVect3 * | mag | ) |
Definition at line 221 of file ahrs_float_dcm.c.
References ahrs_dcm, DefaultChannel, DefaultDevice, AhrsFloatDCM::ltp_to_imu_euler, MAG_Heading_X, MAG_Heading_Y, FloatEulers::phi, FloatEulers::theta, FloatVect3::x, FloatVect3::y, and FloatVect3::z.
Referenced by mag_cb().
Here is the caller graph for this function:| struct AhrsFloatDCM ahrs_dcm |
Definition at line 52 of file ahrs_float_dcm.c.
Referenced by accel_cb(), ahrs_dcm_align(), ahrs_dcm_init(), ahrs_dcm_propagate(), ahrs_dcm_set_body_to_imu_quat(), ahrs_dcm_update_accel(), ahrs_dcm_update_gps(), ahrs_dcm_update_mag(), aligner_cb(), compute_ahrs_representations(), Drift_correction(), gyro_cb(), mag_cb(), Matrix_update(), Normalize(), send_filter_status(), and set_body_orientation_and_rates().
| float imu_health |
Referenced by Drift_correction().
| int renorm_blowup_count |
Referenced by Normalize().
| int renorm_sqrt_count |
Referenced by Normalize().
 1.8.8
1.8.8