|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| void | follow_me (uint8_t headingToFollow, uint8_t heightObject, uint8_t distanceToObject) |
Variables | |
| float | ref_pitch |
| float | ref_roll |
| float | selfie_alt |
Definition in file follow_me.h.
Definition at line 62 of file follow_me.c.
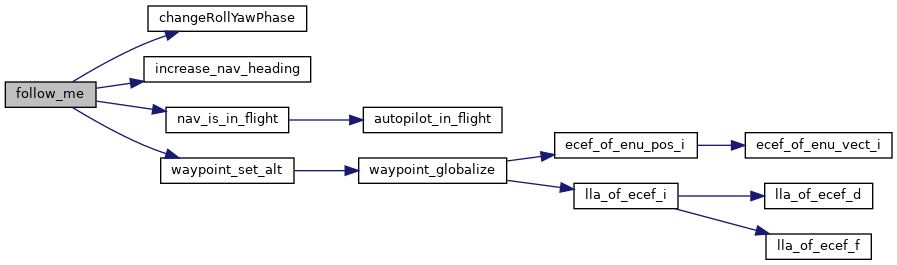
References CENTER_IMAGE_HOR, changeRollYawPhase(), foo, RotorcraftNavigation::heading, HEADING_CHANGE_PER_MEASUREMENT, increase_nav_heading(), MAXIMUM_ALTITUDE_FOLLOWING, MINIMUM_ALTITUDE_FOLLOWING, nav, nav_is_in_flight(), ref_pitch, ref_roll, selfie_alt, STEREOCAM_FOLLOW_ME_USE_OPTITRACK, and waypoint_set_alt().
Referenced by stereocam_parse_msg().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Definition at line 103 of file guidance_OA.c.
Referenced by CN_escape_velocity(), CN_potential_velocity(), CN_vector_escape_velocity(), CN_vector_velocity(), follow_me(), OA_update(), and pingpong_euler().
|
extern |
Definition at line 104 of file guidance_OA.c.
Referenced by CN_escape_velocity(), CN_vector_escape_velocity(), CN_vector_velocity(), follow_me(), OA_update(), and pingpong_euler().
|
extern |
Definition at line 33 of file follow_me.c.
Referenced by follow_me().