|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Paparazzi double precision floating point algebra. More...
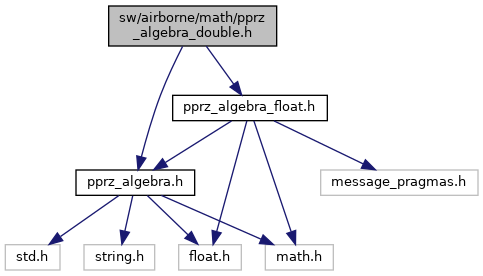
 Include dependency graph for pprz_algebra_double.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for pprz_algebra_double.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | DoubleVect2 |
| struct | DoubleVect3 |
| struct | DoubleQuat |
| Roation quaternion. More... | |
| struct | DoubleMat33 |
| struct | DoubleRMat |
| rotation matrix More... | |
| struct | DoubleEulers |
| euler angles More... | |
| struct | DoubleRates |
| angular rates More... | |
Macros | |
| #define | DOUBLE_VECT3_ROUND(_v) DOUBLE_VECT3_RINT(_v, _v) |
| #define | DOUBLE_VECT3_RINT(_vout, _vin) |
| #define | DOUBLE_RMAT_OF_EULERS(_rm, _e) WARNING("DOUBLE_RMAT_OF_EULERS macro is deprecated, use the lower case function instead") double_rmat_of_eulers(&(_rm), &(_e)) |
| #define | DOUBLE_RMAT_OF_EULERS_321(_rm, _e) WARNING("DOUBLE_RMAT_OF_EULERS_321 macro is deprecated, use the lower case function instead") double_rmat_of_eulers(&(_rm), &(_e)) |
| #define | DOUBLE_QUAT_OF_EULERS(_q, _e) WARNING("DOUBLE_QUAT_OF_EULERS macro is deprecated, use the lower case function instead") double_quat_of_eulers(&(_q), &(_e)) |
| #define | DOUBLE_EULERS_OF_QUAT(_e, _q) WARNING("DOUBLE_EULERS_OF_QUAT macro is deprecated, use the lower case function instead") double_eulers_of_quat(&(_e), &(_q)) |
| #define | DOUBLE_QUAT_VMULT(v_out, q, v_in) WARNING("DOUBLE_QUAT_VMULT macro is deprecated, use the lower case function instead") double_quat_vmult(&(v_out), &(q), &(v_in)) |
Paparazzi double precision floating point algebra.
Definition in file pprz_algebra_double.h.