|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Paparazzi double precision floating point algebra. More...
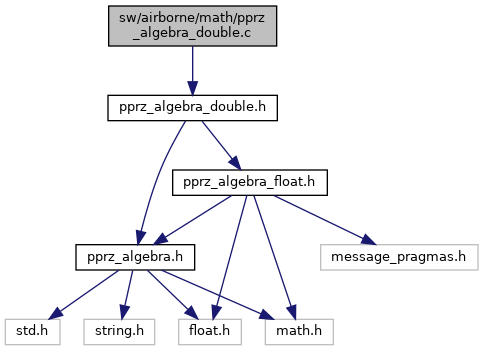
#include "pprz_algebra_double.h" Include dependency graph for pprz_algebra_double.c:
Include dependency graph for pprz_algebra_double.c:Go to the source code of this file.
Functions | |
| void | double_rmat_of_eulers_321 (struct DoubleRMat *rm, struct DoubleEulers *e) |
| Rotation matrix from 321 Euler angles (double). | |
| void | double_quat_of_eulers (struct DoubleQuat *q, struct DoubleEulers *e) |
| void | double_eulers_of_quat (struct DoubleEulers *e, struct DoubleQuat *q) |
| void | double_quat_vmult (struct DoubleVect3 *v_out, struct DoubleQuat *q, struct DoubleVect3 *v_in) |
| void | double_quat_comp (struct DoubleQuat *a2c, struct DoubleQuat *a2b, struct DoubleQuat *b2c) |
| Composition (multiplication) of two quaternions. | |
| void | double_rmat_inv (struct DoubleRMat *m_b2a, struct DoubleRMat *m_a2b) |
| Inverse/transpose of a rotation matrix. | |
| void | double_rmat_comp (struct DoubleRMat *m_a2c, struct DoubleRMat *m_a2b, struct DoubleRMat *m_b2c) |
| Composition (multiplication) of two rotation matrices. | |
| void | double_rmat_vmult (struct DoubleVect3 *vb, struct DoubleRMat *m_a2b, struct DoubleVect3 *va) |
| rotate 3D vector by rotation matrix. | |
| void | double_rmat_transp_vmult (struct DoubleVect3 *vb, struct DoubleRMat *m_b2a, struct DoubleVect3 *va) |
| rotate 3D vector by transposed rotation matrix. | |
| void | double_rmat_of_quat (struct DoubleRMat *rm, struct DoubleQuat *q) |
Paparazzi double precision floating point algebra.
Definition in file pprz_algebra_double.c.