|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Log data required to compute control effectiveness. More...
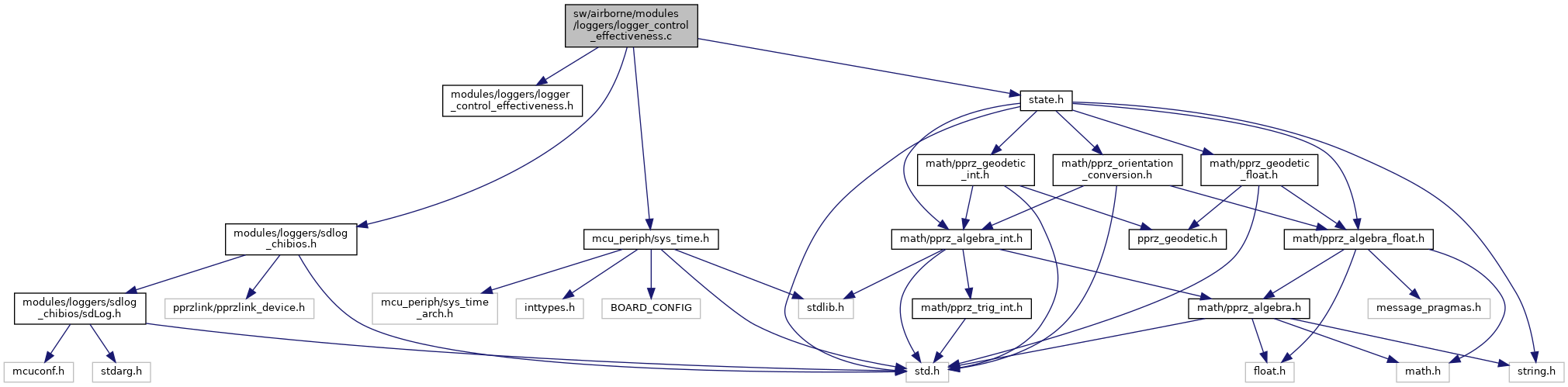
#include "modules/loggers/logger_control_effectiveness.h"#include "modules/loggers/logger_utils.h"#include "mcu_periph/sys_time.h"#include "state.h" Include dependency graph for logger_control_effectiveness.c:
Include dependency graph for logger_control_effectiveness.c:Go to the source code of this file.
Functions | |
| void | logger_control_effectiveness_start (void) |
| Write the log header line according to the enabled parts. | |
| void | logger_control_effectiveness_stop (void) |
| void | logger_control_effectiveness_periodic (void) |
| Log the values to file. | |
Variables | |
| static FILE * | pprzLogFile = NULL |
Log data required to compute control effectiveness.
Definition in file logger_control_effectiveness.c.
Definition at line 36 of file logger_control_effectiveness.c.
Definition at line 37 of file logger_control_effectiveness.c.
Definition at line 54 of file logger_control_effectiveness.c.
Definition at line 66 of file logger_control_effectiveness.c.
Definition at line 50 of file logger_control_effectiveness.c.
| #define LOGGER_CONTROL_EFFECTIVENESS_FILE_PATH /data/ftp/internal_000/control_eff |
Definition at line 42 of file logger_control_effectiveness.c.
Definition at line 58 of file logger_control_effectiveness.c.
Definition at line 62 of file logger_control_effectiveness.c.
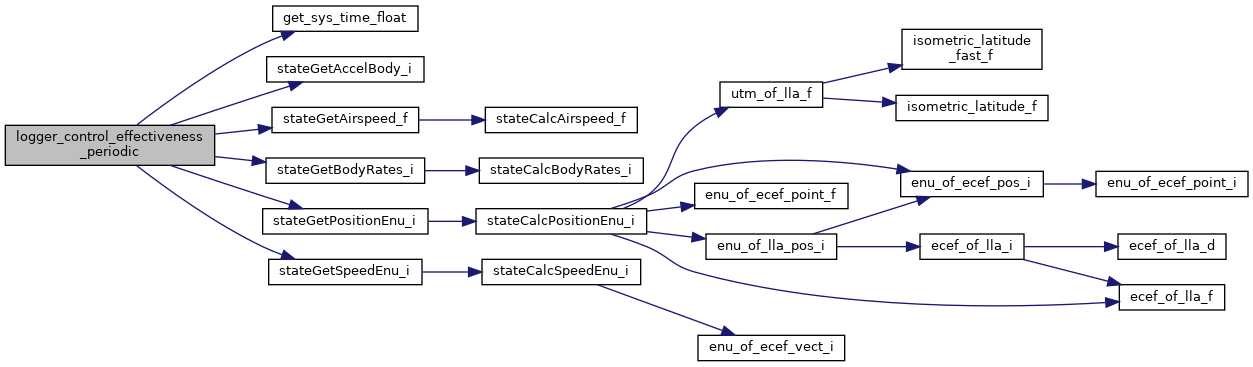
Log the values to file.
Definition at line 117 of file logger_control_effectiveness.c.
References commands, foo, get_sys_time_float(), LogFileIsOpen, LogFormatHeader, LogFormatVect3, LogWrite, Int32Rates::p, pprzLogFile, Int32Rates::q, Int32Rates::r, stateGetAccelBody_i(), stateGetAirspeed_f(), stateGetBodyRates_i(), stateGetPositionEnu_i(), stateGetSpeedEnu_i(), EnuCoor_i::x, EnuCoor_i::y, and EnuCoor_i::z.
Here is the call graph for this function:Write the log header line according to the enabled parts.
Definition at line 80 of file logger_control_effectiveness.c.
References foo, LogFileIsOpen, LOGGER_CONTROL_EFFECTIVENESS_FILE_PATH, LogOpen, LogWrite, and pprzLogFile.
Definition at line 109 of file logger_control_effectiveness.c.
References LogClose, LogFileIsOpen, and pprzLogFile.
Definition at line 38 of file logger_control_effectiveness.c.
Referenced by airspeed_cb(), airspeed_ets_read_event(), aoa_pwm_update(), apogee_baro_event(), baro_cb(), gps_cb(), gps_ubx_parse(), gyro_cb(), humid_sht_periodic(), incidence_cb(), ins_float_invariant_propagate(), ins_mekf_wind_wrapper_init(), logger_control_effectiveness_periodic(), logger_control_effectiveness_start(), logger_control_effectiveness_stop(), mag_cb(), mf_daq_send_report(), mf_ptu_periodic(), parse_acinfo_dl(), pressure_diff_cb(), process_data(), send_acinfo_lla(), temod_event(), traffic_info_log_start(), traffic_info_log_stop(), uwb_positioning_periodic(), wind_estimator_init(), and wind_estimator_step().