|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
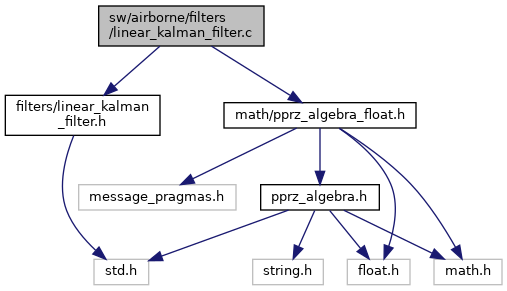
Generic discrete Linear Kalman Filter. More...
 Include dependency graph for linear_kalman_filter.c:
Include dependency graph for linear_kalman_filter.c:Go to the source code of this file.
Functions | |
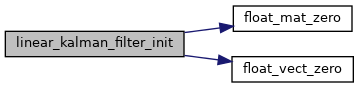
| bool | linear_kalman_filter_init (struct linear_kalman_filter *filter, uint8_t n, uint8_t c, uint8_t m) |
| Init all matrix and vectors to zero. | |
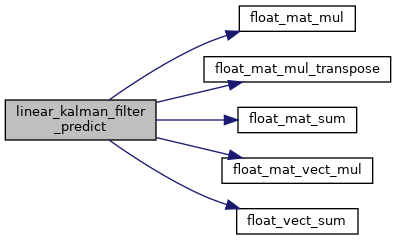
| void | linear_kalman_filter_predict (struct linear_kalman_filter *filter, float *U) |
| Prediction step. | |
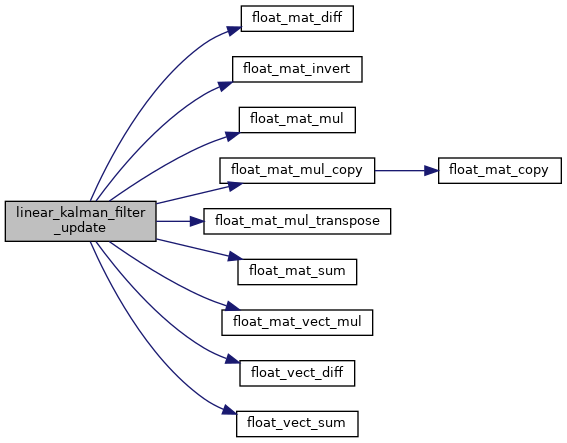
| void | linear_kalman_filter_update (struct linear_kalman_filter *filter, float *Y) |
| Update step. | |
Generic discrete Linear Kalman Filter.
Definition in file linear_kalman_filter.c.
| bool linear_kalman_filter_init | ( | struct linear_kalman_filter * | filter, |
| uint8_t | n, | ||
| uint8_t | c, | ||
| uint8_t | m | ||
| ) |
Init all matrix and vectors to zero.
| filter | pointer to a filter structure |
| n | size of the state vector |
| c | size of the command vector |
| m | size of the measurement vector |
Definition at line 38 of file linear_kalman_filter.c.
References linear_kalman_filter::A, linear_kalman_filter::B, linear_kalman_filter::C, linear_kalman_filter::c, float_mat_zero(), float_vect_zero(), foo, KF_MAX_CMD_SIZE, KF_MAX_MEAS_SIZE, KF_MAX_STATE_SIZE, linear_kalman_filter::m, MAKE_MATRIX_PTR, linear_kalman_filter::n, linear_kalman_filter::P, linear_kalman_filter::Q, linear_kalman_filter::R, and linear_kalman_filter::X.
Referenced by wind_estimation_quadrotor_init().
Here is the call graph for this function: Here is the caller graph for this function:| void linear_kalman_filter_predict | ( | struct linear_kalman_filter * | filter, |
| float * | U | ||
| ) |
Prediction step.
X = Ad * X + Bd * U P = Ad * P * Ad' + Q
| filter | pointer to the filter structure |
| U | command vector |
Definition at line 78 of file linear_kalman_filter.c.
References linear_kalman_filter::A, linear_kalman_filter::B, linear_kalman_filter::c, float_mat_mul(), float_mat_mul_transpose(), float_mat_sum(), float_mat_vect_mul(), float_vect_sum(), foo, MAKE_MATRIX_PTR, linear_kalman_filter::n, linear_kalman_filter::P, linear_kalman_filter::Q, and linear_kalman_filter::X.
Referenced by wind_estimation_quadrotor_periodic().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Update step.
S = Cd * P * Cd' + R K = P * Cd' / S X = X + K * (Y - Cd * X) P = P - K * Cd * P
| filter | pointer to the filter structure |
| Y | measurement vector |
Definition at line 111 of file linear_kalman_filter.c.
References linear_kalman_filter::C, float_mat_diff(), float_mat_invert(), float_mat_mul(), float_mat_mul_copy(), float_mat_mul_transpose(), float_mat_sum(), float_mat_vect_mul(), float_vect_diff(), float_vect_sum(), foo, K, linear_kalman_filter::m, MAKE_MATRIX_PTR, linear_kalman_filter::n, linear_kalman_filter::P, linear_kalman_filter::R, and linear_kalman_filter::X.
Referenced by wind_estimation_quadrotor_periodic().
Here is the call graph for this function: Here is the caller graph for this function: