|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
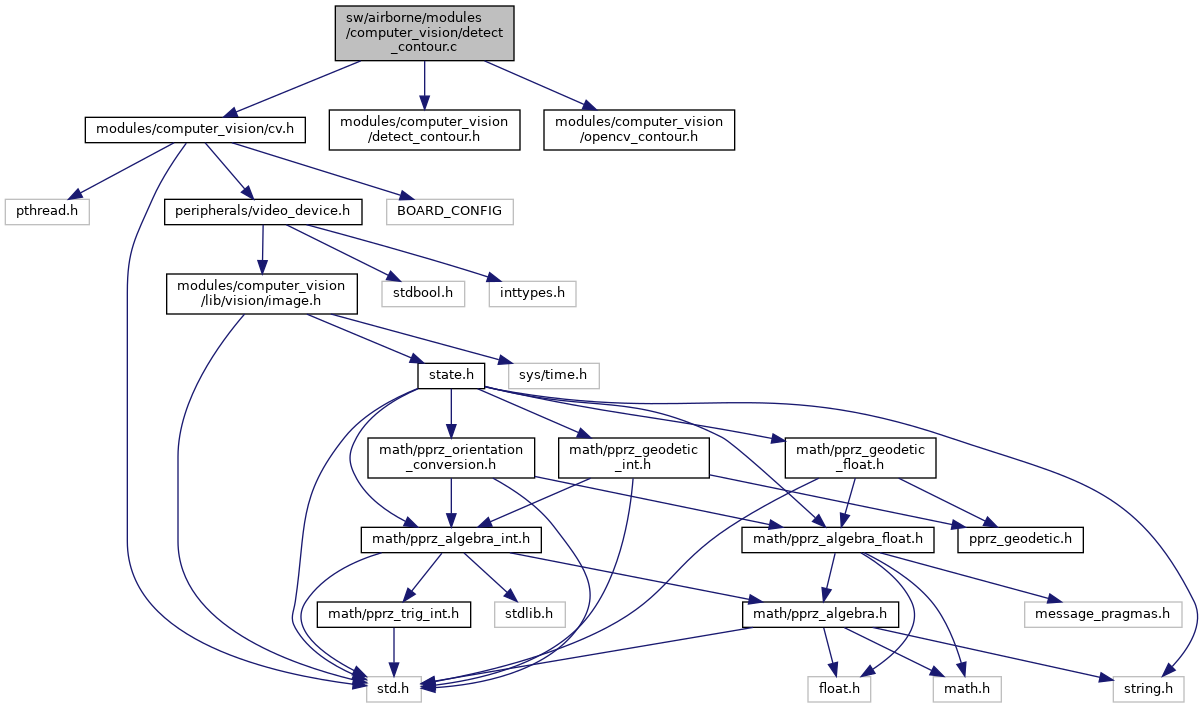
#include "modules/computer_vision/cv.h"#include "modules/computer_vision/detect_contour.h"#include "modules/computer_vision/opencv_contour.h" Include dependency graph for detect_contour.c:
Include dependency graph for detect_contour.c:Go to the source code of this file.
Macros | |
| #define | DETECT_CONTOUR_FPS 0 |
| Default FPS (zero means run at camera fps) | |
Functions | |
| struct image_t * | contour_func (struct image_t *img, uint8_t camera_id) |
| void | detect_contour_init (void) |
Definition in file detect_contour.c.
| #define DETECT_CONTOUR_FPS 0 |
Default FPS (zero means run at camera fps)
Definition at line 31 of file detect_contour.c.
Definition at line 37 of file detect_contour.c.
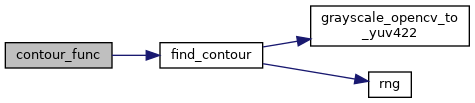
References find_contour(), foo, and IMAGE_YUV422.
Referenced by detect_contour_init().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 47 of file detect_contour.c.
References cont_thres, contour_func(), cv_add_to_device(), DETECT_CONTOUR_FPS, foo, contour_threshold::lower_u, contour_threshold::lower_v, contour_threshold::lower_y, contour_threshold::upper_u, contour_threshold::upper_v, and contour_threshold::upper_y.
Here is the call graph for this function: