|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
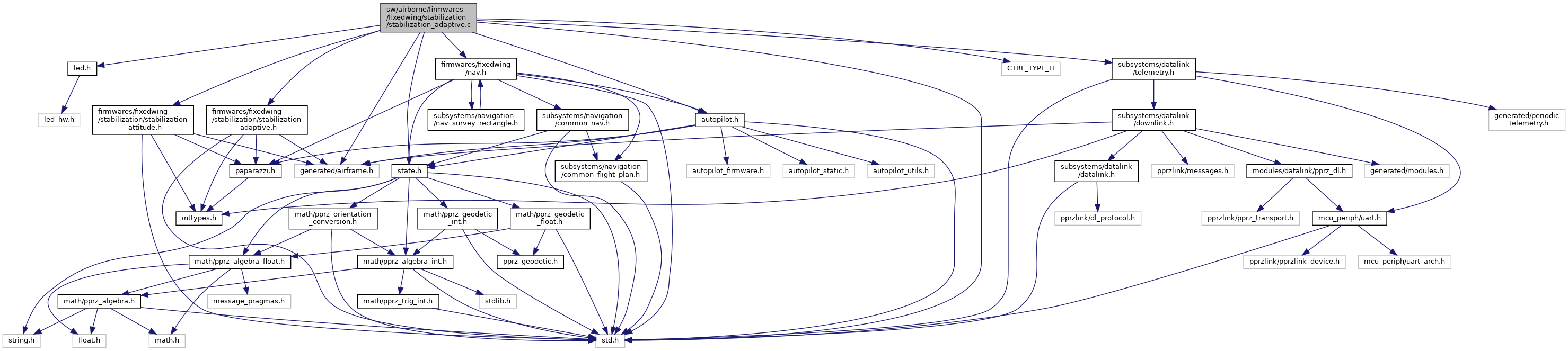
#include "std.h"#include "led.h"#include "firmwares/fixedwing/stabilization/stabilization_attitude.h"#include "firmwares/fixedwing/stabilization/stabilization_adaptive.h"#include "state.h"#include "firmwares/fixedwing/nav.h"#include "generated/airframe.h"#include <CTRL_TYPE_H>#include "autopilot.h"#include "subsystems/datalink/telemetry.h" Include dependency graph for stabilization_adaptive.c:
Include dependency graph for stabilization_adaptive.c:Go to the source code of this file.
Data Structures | |
| struct | HCtlAdaptRef |
Macros | |
| #define | H_CTL_REF_W_P 5. |
| #define | H_CTL_REF_XI_P 0.85 |
| #define | H_CTL_REF_W_Q 5. |
| #define | H_CTL_REF_XI_Q 0.85 |
| #define | H_CTL_REF_W_R 5. |
| #define | H_CTL_REF_XI_R 0.85 |
| #define | H_CTL_REF_MAX_P RadOfDeg(150.) |
| #define | H_CTL_REF_MAX_P_DOT RadOfDeg(500.) |
| #define | H_CTL_REF_MAX_Q RadOfDeg(150.) |
| #define | H_CTL_REF_MAX_Q_DOT RadOfDeg(500.) |
| #define | AIRSPEED_RATIO_MIN 0.5 |
| #define | AIRSPEED_RATIO_MAX 2. |
| #define | PITCH_TRIM_RATE_LIMITER 3. |
| #define | H_CTL_COURSE_PRE_BANK_CORRECTION 1. |
| #define | H_CTL_COURSE_DGAIN 0. |
| #define | H_CTL_ROLL_RATE_GAIN 0. |
| #define | H_CTL_ROLL_IGAIN 0. |
| #define | H_CTL_ROLL_KFFA 0. |
| #define | H_CTL_ROLL_KFFD 0. |
| #define | H_CTL_PITCH_DGAIN 0. |
| #define | H_CTL_PITCH_IGAIN 0. |
| #define | H_CTL_PITCH_KFFA 0. |
| #define | H_CTL_PITCH_KFFD 0. |
| #define | H_CTL_YAW_KFFD 0. |
| #define | USE_GYRO_PITCH_RATE TRUE |
| #define | H_CTL_REF_DT (1./CONTROL_FREQUENCY) |
| Define reference generator time step default to control frequency and ahrs propagation freq if control is triggered by ahrs. More... | |
| #define | KFFA_UPDATE 0.1 |
| Adaptive control tuning parameters activate with USE_KFF_UPDATE. More... | |
| #define | KFFD_UPDATE 0.05 |
Functions | |
| static void | h_ctl_roll_loop (void) |
| static void | h_ctl_pitch_loop (void) |
| static void | send_calibration (struct transport_tx *trans, struct link_device *dev) |
| static void | send_tune_roll (struct transport_tx *trans, struct link_device *dev) |
| static void | send_ctl_a (struct transport_tx *trans, struct link_device *dev) |
| void | h_ctl_init (void) |
| void | h_ctl_course_loop (void) |
| void | h_ctl_attitude_loop (void) |
Variables | |
| float | h_ctl_course_setpoint |
| float | h_ctl_course_pre_bank |
| float | h_ctl_course_pre_bank_correction |
| float | h_ctl_course_pgain |
| float | h_ctl_course_dgain |
| float | h_ctl_roll_max_setpoint |
| bool | h_ctl_disabled |
| bool | h_ctl_auto1_rate |
| struct HCtlAdaptRef | h_ctl_ref |
| float | h_ctl_roll_setpoint |
| float | h_ctl_roll_attitude_gain |
| float | h_ctl_roll_rate_gain |
| float | h_ctl_roll_igain |
| float | h_ctl_roll_sum_err |
| float | h_ctl_roll_Kffa |
| float | h_ctl_roll_Kffd |
| pprz_t | h_ctl_aileron_setpoint |
| float | h_ctl_roll_slew |
| float | h_ctl_roll_pgain |
| float | h_ctl_pitch_setpoint |
| float | h_ctl_pitch_loop_setpoint |
| float | h_ctl_pitch_pgain |
| float | h_ctl_pitch_dgain |
| float | h_ctl_pitch_igain |
| float | h_ctl_pitch_sum_err |
| float | h_ctl_pitch_Kffa |
| float | h_ctl_pitch_Kffd |
| pprz_t | h_ctl_elevator_setpoint |
| float | h_ctl_aileron_of_throttle |
| float | h_ctl_elevator_of_roll |
| float | h_ctl_pitch_of_roll |
| bool | use_airspeed_ratio |
| float | airspeed_ratio2 |
| float | v_ctl_pitch_loiter_trim |
| float | v_ctl_pitch_dash_trim |
Fixed wing adaptive control.
to use the attitude referece generator define <define name="USE_ANGLE_REF">
to use the adaptive part for roll and/or pitch define <define name="USE_KFF_UPDATE_ROLL"> <define name="USE_KFF_UPDATE_PITCH">
to use the yaw damper <section name="AUTO1" prefix="AUTO1_"> <define name="MAX_YAW_RATE" value="RadOfDeg(100)"> </section>
<section name="HORIZONTAL CONTROL" prefix="H_CTL_"> <define name="YAW_LOOP" value="TRUE"> <define name="YAW_DGAIN" value="5000."> </section>
in addition "ny" can be trimed to minimize the sideslip angle <section name="HORIZONTAL CONTROL" prefix="H_CTL_"> <define name="YAW_TRIM_NY" value="TRUE"> <define name="YAW_NY_IGAIN" value="5000."> </section>
to use the automatic flap control define <section name="HORIZONTAL CONTROL" prefix="H_CTL_"> <define name="CL_LOOP" value="TRUE"> <define name="CL_LOOP_USE_AIRSPEED_SETPOINT" value="TRUE"> <define name="CL_FLAPS_STALL" value="0.8"> <define name="CL_FLAPS_NOMINAL" value="0."> <define name="CL_FLAPS_RACE" value="-0.5"> <define name="CL_DEADBAND" value="1."> </section>
the actual flap setting can also be increased by the loadfactor "nz" <section name="HORIZONTAL CONTROL" prefix="H_CTL_"> <define name="CL_LOOP_INCREASE_FLAPS_WITH_LOADFACTOR" value="TRUE"> </section>
Definition in file stabilization_adaptive.c.
| struct HCtlAdaptRef |
Definition at line 93 of file stabilization_adaptive.c.
| #define AIRSPEED_RATIO_MAX 2. |
Definition at line 202 of file stabilization_adaptive.c.
| #define AIRSPEED_RATIO_MIN 0.5 |
Definition at line 201 of file stabilization_adaptive.c.
| #define H_CTL_COURSE_DGAIN 0. |
Definition at line 226 of file stabilization_adaptive.c.
| #define H_CTL_COURSE_PRE_BANK_CORRECTION 1. |
Definition at line 223 of file stabilization_adaptive.c.
| #define H_CTL_PITCH_DGAIN 0. |
Definition at line 247 of file stabilization_adaptive.c.
| #define H_CTL_PITCH_IGAIN 0. |
Definition at line 250 of file stabilization_adaptive.c.
| #define H_CTL_PITCH_KFFA 0. |
Definition at line 253 of file stabilization_adaptive.c.
| #define H_CTL_PITCH_KFFD 0. |
Definition at line 256 of file stabilization_adaptive.c.
| #define H_CTL_REF_DT (1./CONTROL_FREQUENCY) |
Define reference generator time step default to control frequency and ahrs propagation freq if control is triggered by ahrs.
Definition at line 437 of file stabilization_adaptive.c.
| #define H_CTL_REF_MAX_P RadOfDeg(150.) |
Definition at line 134 of file stabilization_adaptive.c.
| #define H_CTL_REF_MAX_P_DOT RadOfDeg(500.) |
Definition at line 137 of file stabilization_adaptive.c.
| #define H_CTL_REF_MAX_Q RadOfDeg(150.) |
Definition at line 140 of file stabilization_adaptive.c.
| #define H_CTL_REF_MAX_Q_DOT RadOfDeg(500.) |
Definition at line 143 of file stabilization_adaptive.c.
| #define H_CTL_REF_W_P 5. |
Definition at line 116 of file stabilization_adaptive.c.
| #define H_CTL_REF_W_Q 5. |
Definition at line 122 of file stabilization_adaptive.c.
| #define H_CTL_REF_W_R 5. |
Definition at line 128 of file stabilization_adaptive.c.
| #define H_CTL_REF_XI_P 0.85 |
Definition at line 119 of file stabilization_adaptive.c.
| #define H_CTL_REF_XI_Q 0.85 |
Definition at line 125 of file stabilization_adaptive.c.
| #define H_CTL_REF_XI_R 0.85 |
Definition at line 131 of file stabilization_adaptive.c.
| #define H_CTL_ROLL_IGAIN 0. |
Definition at line 235 of file stabilization_adaptive.c.
| #define H_CTL_ROLL_KFFA 0. |
Definition at line 238 of file stabilization_adaptive.c.
| #define H_CTL_ROLL_KFFD 0. |
Definition at line 241 of file stabilization_adaptive.c.
| #define H_CTL_ROLL_RATE_GAIN 0. |
Definition at line 232 of file stabilization_adaptive.c.
| #define H_CTL_YAW_KFFD 0. |
Definition at line 261 of file stabilization_adaptive.c.
| #define KFFA_UPDATE 0.1 |
Adaptive control tuning parameters activate with USE_KFF_UPDATE.
!!! under development, use with care !!!
Definition at line 445 of file stabilization_adaptive.c.
| #define KFFD_UPDATE 0.05 |
Definition at line 446 of file stabilization_adaptive.c.
| #define PITCH_TRIM_RATE_LIMITER 3. |
Definition at line 209 of file stabilization_adaptive.c.
| #define USE_GYRO_PITCH_RATE TRUE |
Definition at line 265 of file stabilization_adaptive.c.
| void h_ctl_attitude_loop | ( | void | ) |
Definition at line 413 of file stabilization_adaptive.c.
Referenced by attitude_loop().
Here is the caller graph for this function:| void h_ctl_course_loop | ( | void | ) |
Definition at line 374 of file stabilization_adaptive.c.
Referenced by h_ctl_guidance_loop(), and navigation_task().
Here is the caller graph for this function:| void h_ctl_init | ( | void | ) |
Definition at line 298 of file stabilization_adaptive.c.
|
inlinestatic |
Definition at line 549 of file stabilization_adaptive.c.
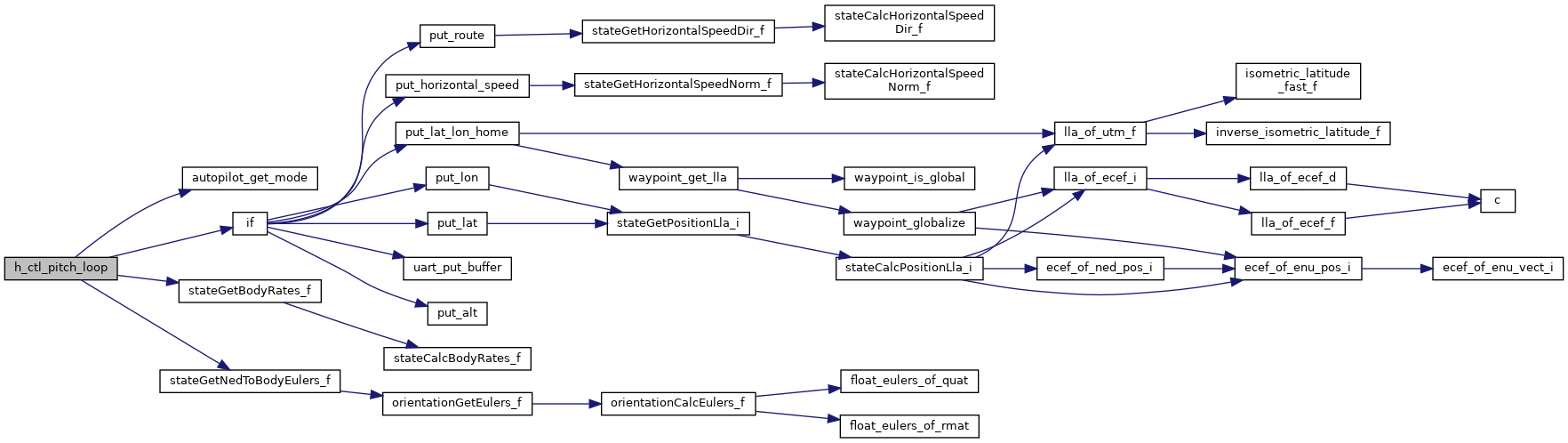
References airspeed_ratio2, AP_MODE_MANUAL, autopilot, autopilot_get_mode(), h_ctl_elevator_setpoint, h_ctl_pitch_dgain, h_ctl_pitch_igain, h_ctl_pitch_Kffa, h_ctl_pitch_Kffd, h_ctl_pitch_loop_setpoint, h_ctl_pitch_of_roll, h_ctl_pitch_pgain, h_ctl_pitch_setpoint, h_ctl_pitch_sum_err, H_CTL_PITCH_SUM_ERR_MAX, h_ctl_ref, H_CTL_REF_DT, H_CTL_REF_W_Q, H_CTL_REF_XI_Q, if(), KFFA_UPDATE, KFFD_UPDATE, pprz_autopilot::launch, Max, HCtlAdaptRef::max_q, HCtlAdaptRef::max_q_dot, HCtlAdaptRef::pitch_accel, HCtlAdaptRef::pitch_angle, HCtlAdaptRef::pitch_rate, FloatRates::q, stateGetBodyRates_f(), stateGetNedToBodyEulers_f(), FloatEulers::theta, and TRIM_PPRZ.
Referenced by h_ctl_attitude_loop().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Definition at line 448 of file stabilization_adaptive.c.
References airspeed_ratio2, AP_MODE_MANUAL, autopilot, autopilot_get_mode(), h_ctl_aileron_of_throttle, h_ctl_aileron_setpoint, h_ctl_ref, H_CTL_REF_DT, H_CTL_REF_W_P, H_CTL_REF_XI_P, h_ctl_roll_attitude_gain, h_ctl_roll_igain, h_ctl_roll_Kffa, h_ctl_roll_Kffd, h_ctl_roll_rate_gain, h_ctl_roll_setpoint, h_ctl_roll_sum_err, H_CTL_ROLL_SUM_ERR_MAX, KFFA_UPDATE, KFFD_UPDATE, pprz_autopilot::launch, Max, HCtlAdaptRef::max_p, HCtlAdaptRef::max_p_dot, FloatRates::p, FloatEulers::phi, HCtlAdaptRef::roll_accel, HCtlAdaptRef::roll_angle, HCtlAdaptRef::roll_rate, stateGetBodyRates_f(), stateGetNedToBodyEulers_f(), TRIM_PPRZ, and v_ctl_throttle_setpoint.
Referenced by h_ctl_attitude_loop().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 271 of file stabilization_adaptive.c.
References dev, v_ctl_auto_throttle_submode, and v_ctl_auto_throttle_sum_err.
Referenced by h_ctl_init().
Here is the caller graph for this function:
|
static |
Definition at line 282 of file stabilization_adaptive.c.
References dev, h_ctl_aileron_setpoint, h_ctl_elevator_setpoint, h_ctl_pitch_loop_setpoint, h_ctl_pitch_sum_err, h_ctl_ref, h_ctl_roll_setpoint, h_ctl_roll_sum_err, HCtlAdaptRef::pitch_angle, HCtlAdaptRef::roll_angle, and stateGetNedToBodyEulers_f().
Referenced by h_ctl_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 276 of file stabilization_adaptive.c.
References dev, h_ctl_roll_setpoint, p, stateGetBodyRates_f(), and stateGetNedToBodyEulers_f().
Referenced by h_ctl_init().
Here is the call graph for this function: Here is the caller graph for this function:| float airspeed_ratio2 |
Definition at line 200 of file stabilization_adaptive.c.
Referenced by h_ctl_init(), h_ctl_pitch_loop(), and h_ctl_roll_loop().
| float h_ctl_aileron_of_throttle |
Definition at line 195 of file stabilization_adaptive.c.
Referenced by h_ctl_init(), and h_ctl_roll_loop().
| pprz_t h_ctl_aileron_setpoint |
Definition at line 164 of file stabilization_adaptive.c.
Referenced by attitude_loop(), file_logger_write_row(), h_ctl_init(), h_ctl_roll_loop(), and send_ctl_a().
| bool h_ctl_auto1_rate |
Definition at line 91 of file stabilization_adaptive.c.
Referenced by navigation_task().
| float h_ctl_course_dgain |
Definition at line 84 of file stabilization_adaptive.c.
Referenced by h_ctl_course_loop(), and h_ctl_init().
| float h_ctl_course_pgain |
Definition at line 83 of file stabilization_adaptive.c.
Referenced by fly_to_xy(), h_ctl_course_loop(), and h_ctl_init().
| float h_ctl_course_pre_bank |
Definition at line 81 of file stabilization_adaptive.c.
Referenced by h_ctl_course_loop(), h_ctl_init(), and nav_periodic_task().
| float h_ctl_course_pre_bank_correction |
Definition at line 82 of file stabilization_adaptive.c.
Referenced by h_ctl_course_loop(), and h_ctl_init().
| float h_ctl_course_setpoint |
Definition at line 80 of file stabilization_adaptive.c.
Referenced by fly_to_xy(), h_ctl_course_loop(), h_ctl_init(), and send_desired().
| bool h_ctl_disabled |
Definition at line 88 of file stabilization_adaptive.c.
Referenced by h_ctl_attitude_loop(), and h_ctl_init().
| float h_ctl_elevator_of_roll |
Definition at line 196 of file stabilization_adaptive.c.
Referenced by h_ctl_init().
| pprz_t h_ctl_elevator_setpoint |
Definition at line 178 of file stabilization_adaptive.c.
Referenced by attitude_loop(), file_logger_write_row(), h_ctl_init(), h_ctl_pitch_loop(), and send_ctl_a().
| float h_ctl_pitch_dgain |
Definition at line 173 of file stabilization_adaptive.c.
Referenced by h_ctl_init(), and h_ctl_pitch_loop().
| float h_ctl_pitch_igain |
Definition at line 174 of file stabilization_adaptive.c.
Referenced by h_ctl_init(), and h_ctl_pitch_loop().
| float h_ctl_pitch_Kffa |
Definition at line 176 of file stabilization_adaptive.c.
Referenced by h_ctl_init(), and h_ctl_pitch_loop().
| float h_ctl_pitch_Kffd |
Definition at line 177 of file stabilization_adaptive.c.
Referenced by h_ctl_init(), and h_ctl_pitch_loop().
| float h_ctl_pitch_loop_setpoint |
Definition at line 171 of file stabilization_adaptive.c.
Referenced by h_ctl_init(), h_ctl_pitch_loop(), send_ctl_a(), and send_desired().
| float h_ctl_pitch_of_roll |
Definition at line 197 of file stabilization_adaptive.c.
Referenced by h_ctl_init(), and h_ctl_pitch_loop().
| float h_ctl_pitch_pgain |
Definition at line 172 of file stabilization_adaptive.c.
Referenced by h_ctl_init(), and h_ctl_pitch_loop().
| float h_ctl_pitch_setpoint |
Definition at line 170 of file stabilization_adaptive.c.
Referenced by attitude_loop(), autopilot_static_on_rc_frame(), h_ctl_guidance_loop(), h_ctl_init(), and h_ctl_pitch_loop().
| float h_ctl_pitch_sum_err |
Definition at line 175 of file stabilization_adaptive.c.
Referenced by h_ctl_init(), h_ctl_pitch_loop(), and send_ctl_a().
| struct HCtlAdaptRef h_ctl_ref |
Definition at line 112 of file stabilization_adaptive.c.
Referenced by h_ctl_init(), h_ctl_pitch_loop(), h_ctl_roll_loop(), and send_ctl_a().
| float h_ctl_roll_attitude_gain |
Definition at line 158 of file stabilization_adaptive.c.
Referenced by h_ctl_init(), and h_ctl_roll_loop().
| float h_ctl_roll_igain |
Definition at line 160 of file stabilization_adaptive.c.
Referenced by h_ctl_init(), and h_ctl_roll_loop().
| float h_ctl_roll_Kffa |
Definition at line 162 of file stabilization_adaptive.c.
Referenced by h_ctl_init(), and h_ctl_roll_loop().
| float h_ctl_roll_Kffd |
Definition at line 163 of file stabilization_adaptive.c.
Referenced by h_ctl_init(), and h_ctl_roll_loop().
| float h_ctl_roll_max_setpoint |
Definition at line 85 of file stabilization_adaptive.c.
Referenced by collective_tracking_control(), fly_to_xy(), gvf_control_2D(), gvf_parametric_low_level_control_2D(), gvf_parametric_low_level_control_3D(), h_ctl_course_loop(), and h_ctl_init().
| float h_ctl_roll_pgain |
Definition at line 167 of file stabilization_adaptive.c.
| float h_ctl_roll_rate_gain |
Definition at line 159 of file stabilization_adaptive.c.
Referenced by h_ctl_init(), and h_ctl_roll_loop().
| float h_ctl_roll_setpoint |
Definition at line 157 of file stabilization_adaptive.c.
Referenced by autopilot_static_on_rc_frame(), collective_tracking_control(), fly_to_xy(), gvf_control_2D(), gvf_parametric_low_level_control_2D(), gvf_parametric_low_level_control_3D(), h_ctl_course_loop(), h_ctl_init(), h_ctl_roll_loop(), nav_without_gps(), send_ctl_a(), send_desired(), send_tune_roll(), and v_ctl_landing_loop().
| float h_ctl_roll_slew |
Definition at line 165 of file stabilization_adaptive.c.
| float h_ctl_roll_sum_err |
Definition at line 161 of file stabilization_adaptive.c.
Referenced by h_ctl_init(), h_ctl_roll_loop(), and send_ctl_a().
| bool use_airspeed_ratio |
Definition at line 199 of file stabilization_adaptive.c.
Referenced by h_ctl_init().
| float v_ctl_pitch_dash_trim |
Definition at line 205 of file stabilization_adaptive.c.
Referenced by h_ctl_init().
| float v_ctl_pitch_loiter_trim |
Definition at line 204 of file stabilization_adaptive.c.
Referenced by h_ctl_init().
 1.8.17
1.8.17