|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
#include "firmwares/rover/navigation.h"#include "pprz_debug.h"#include "subsystems/gps.h"#include "subsystems/ins.h"#include "state.h"#include "autopilot.h"#include "generated/modules.h"#include "generated/flight_plan.h"#include "math/pprz_algebra_int.h"#include "subsystems/datalink/downlink.h"#include "pprzlink/messages.h"#include "mcu_periph/uart.h"#include "subsystems/datalink/telemetry.h" Include dependency graph for navigation.c:
Include dependency graph for navigation.c:Go to the source code of this file.
Macros | |
| #define | NAV_C |
Functions | |
| void | set_exception_flag (uint8_t flag_num) |
| static void | send_wp_moved (struct transport_tx *trans, struct link_device *dev) |
| void | nav_init (void) |
| Navigation Initialisation. More... | |
| void | nav_run (void) |
| bool | nav_check_wp_time (struct EnuCoor_f *wp, float stay_time) |
| Check the time spent in a radius of 'ARRIVED_AT_WAYPOINT' around a wp More... | |
| void | nav_reset_reference (void) |
| Reset the geographic reference to the current GPS fix. More... | |
| void | nav_reset_alt (void) |
| void | nav_init_stage (void) |
| needs to be implemented by fixedwing and rotorcraft seperately More... | |
| void | nav_periodic_task (void) |
| Navigation main: call to the code generated from the XML flight plan. More... | |
| bool | nav_is_in_flight (void) |
| void | nav_home (void) |
| Home mode navigation. More... | |
| float | get_dist2_to_point (struct EnuCoor_f *p) |
| Returns squared horizontal distance to given point. More... | |
| float | get_dist2_to_waypoint (uint8_t wp_id) |
| Returns squared horizontal distance to given waypoint. More... | |
| void | compute_dist2_to_home (void) |
| Computes squared distance to the HOME waypoint potentially sets too_far_from_home. More... | |
| void | nav_set_heading_rad (float rad) |
| Set nav_heading in radians. More... | |
| void | nav_set_heading_deg (float deg) |
| Set nav_heading in degrees. More... | |
| void | nav_set_heading_towards (float x, float y) |
| Set heading to point towards x,y position in local coordinates. More... | |
| void | nav_set_heading_towards_waypoint (uint8_t wp) |
| Set heading in the direction of a waypoint. More... | |
| void | nav_set_heading_towards_target (void) |
| Set heading in the direction of the target. More... | |
| void | nav_set_heading_current (void) |
| Set heading to the current yaw angle. More... | |
| void | nav_set_failsafe (void) |
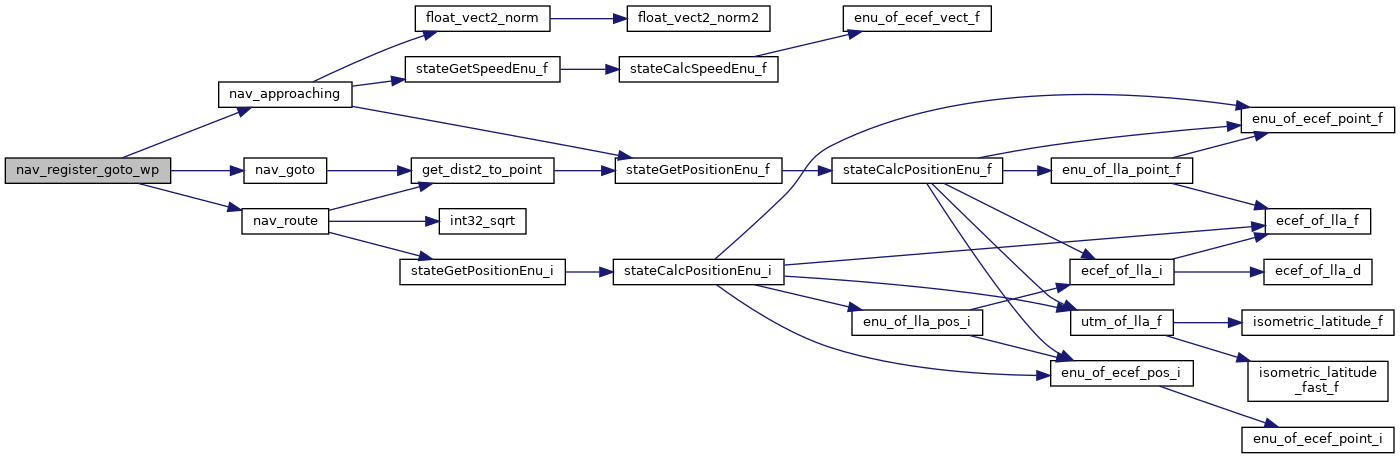
| void | nav_register_goto_wp (nav_rover_goto nav_goto, nav_rover_route nav_route, nav_rover_approaching nav_approaching) |
| Register functions. More... | |
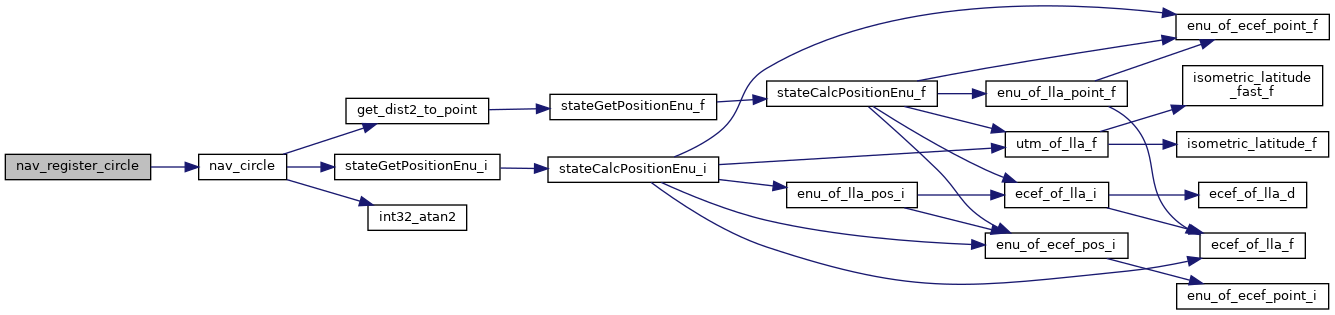
| void | nav_register_circle (nav_rover_circle nav_circle) |
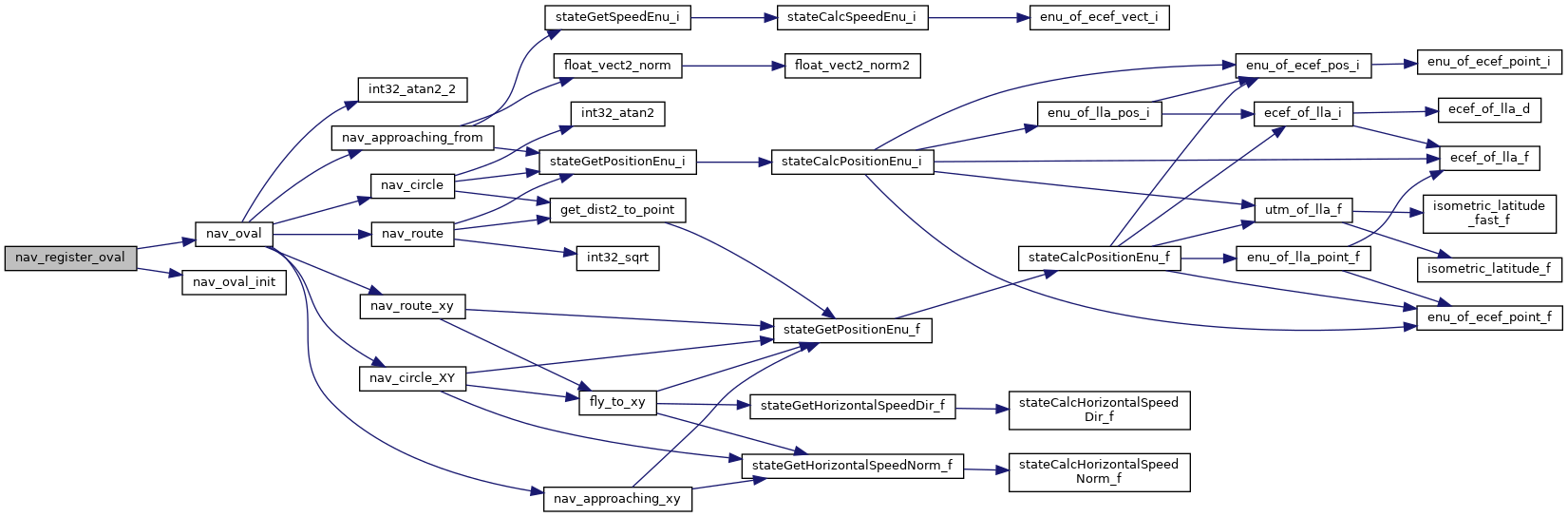
| void | nav_register_oval (nav_rover_oval_init nav_oval_init, nav_rover_oval nav_oval) |
Variables | |
| struct RoverNavigation | nav |
| uint8_t | last_wp |
| Index of last waypoint. More... | |
| const float | max_dist_from_home = MAX_DIST_FROM_HOME |
| const float | max_dist2_from_home = MAX_DIST_FROM_HOME * MAX_DIST_FROM_HOME |
| float | failsafe_mode_dist2 = FAILSAFE_MODE_DISTANCE * FAILSAFE_MODE_DISTANCE |
| maximum squared distance to home wp before going to failsafe mode More... | |
Rover navigation functions.
Definition in file navigation.c.
| #define NAV_C |
Definition at line 28 of file navigation.c.
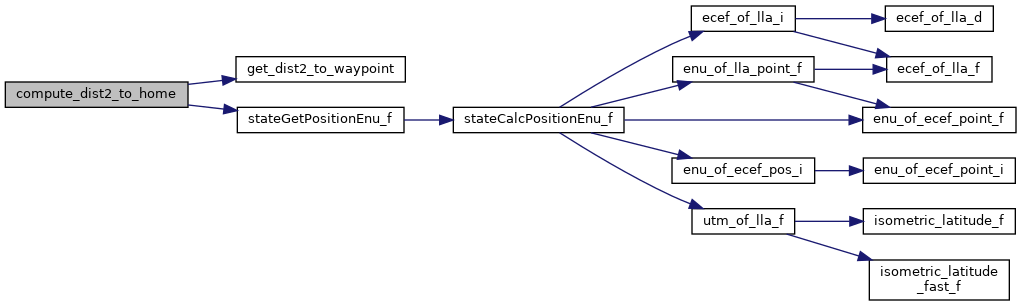
| void compute_dist2_to_home | ( | void | ) |
Computes squared distance to the HOME waypoint potentially sets too_far_from_home.
Definition at line 226 of file navigation.c.
References RoverNavigation::dist2_to_home, get_dist2_to_waypoint(), max_dist2_from_home, nav, stateGetPositionEnu_f(), RoverNavigation::too_far_from_home, EnuCoor_f::x, and EnuCoor_f::y.
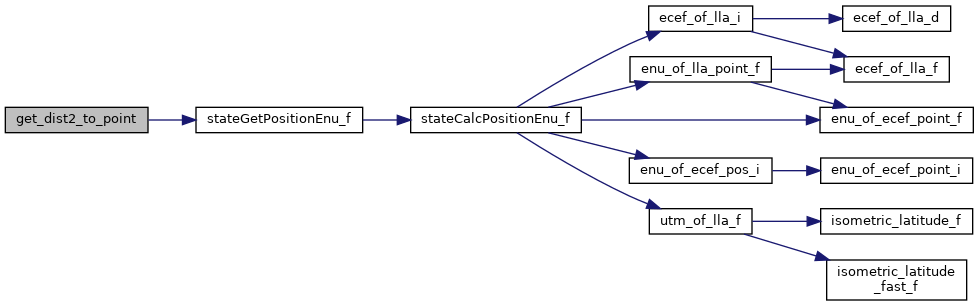
Here is the call graph for this function:| float get_dist2_to_point | ( | struct EnuCoor_f * | p | ) |
Returns squared horizontal distance to given point.
Definition at line 207 of file navigation.c.
References p, pos_diff, stateGetPositionEnu_f(), FloatVect2::x, EnuCoor_f::x, FloatVect2::y, and EnuCoor_f::y.
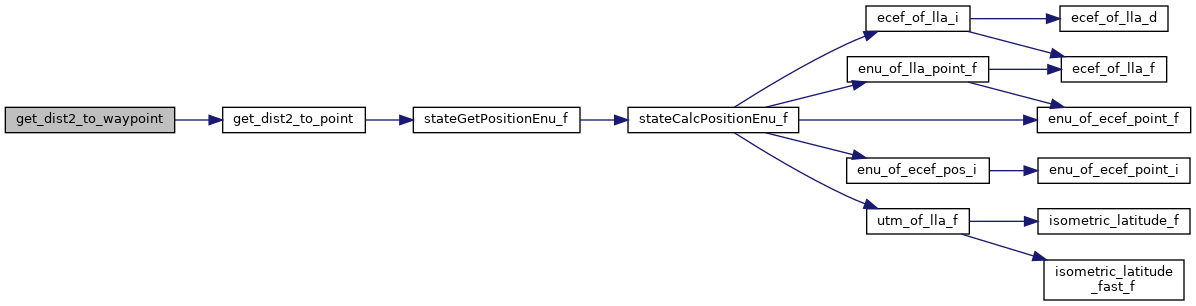
Here is the call graph for this function:| float get_dist2_to_waypoint | ( | uint8_t | wp_id | ) |
Returns squared horizontal distance to given waypoint.
Definition at line 218 of file navigation.c.
References get_dist2_to_point(), and waypoints.
Referenced by NavGotoWaypoint(), and NavGotoWaypointHeading().
Here is the call graph for this function: Here is the caller graph for this function:| bool nav_check_wp_time | ( | struct EnuCoor_f * | wp, |
| float | stay_time | ||
| ) |
Check the time spent in a radius of 'ARRIVED_AT_WAYPOINT' around a wp
Definition at line 115 of file navigation.c.
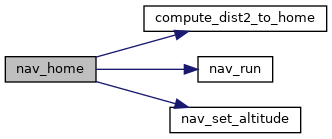
| void nav_home | ( | void | ) |
Home mode navigation.
Home mode navigation (circle around HOME)
Nominal speed
Definition at line 195 of file navigation.c.
References autopilot, compute_dist2_to_home(), dist2_to_home, dist2_to_wp, FAILSAFE_HOME_RADIUS, ground_alt, pprz_autopilot::launch, RoverNavigation::mode, nav, nav_altitude, NAV_MODE_WAYPOINT, nav_pitch, nav_run(), nav_set_altitude(), NavCircleWaypoint, RoverNavigation::target, v_ctl_mode, V_CTL_MODE_AUTO_ALT, V_CTL_MODE_AUTO_THROTTLE, v_ctl_throttle_setpoint, VECT3_COPY, and waypoints.
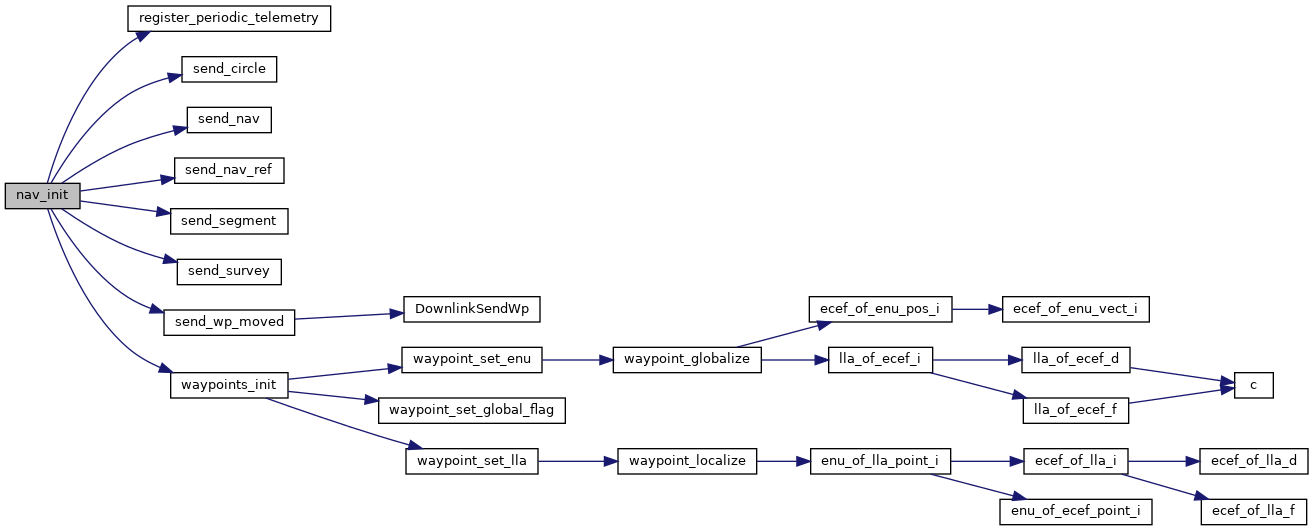
Here is the call graph for this function:| void nav_init | ( | void | ) |
Navigation Initialisation.
Definition at line 80 of file navigation.c.
References RoverNavigation::carrot, DEFAULT_CIRCLE_RADIUS, DefaultPeriodic, RoverNavigation::dist2_to_home, fp_climb, fp_pitch, fp_throttle, ground_alt, RoverNavigation::heading, RoverNavigation::mode, nav, nav_block, nav_glide_pitch_trim, NAV_GLIDE_PITCH_TRIM, nav_ground_speed_pgain, nav_ground_speed_setpoint, nav_mode, NAV_MODE_COURSE, NAV_MODE_WAYPOINT, nav_radius, nav_stage, nav_survey_shift, RoverNavigation::radius, register_periodic_telemetry(), send_circle(), send_nav(), send_nav_ref(), send_segment(), send_survey(), send_wp_moved(), RoverNavigation::shift, RoverNavigation::speed, RoverNavigation::target, RoverNavigation::too_far_from_home, RoverNavigation::turn, VECT3_COPY, waypoints, and waypoints_init().
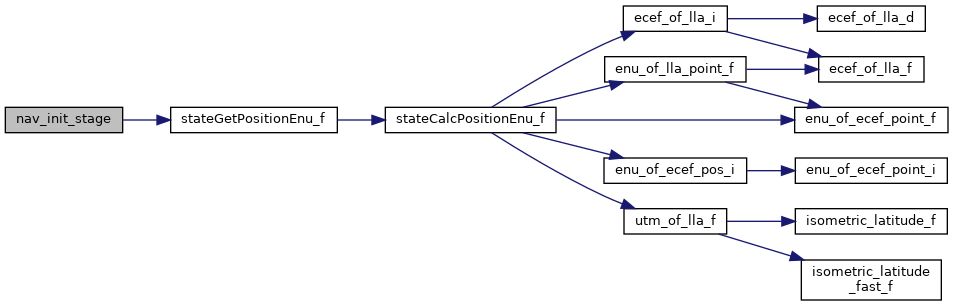
Here is the call graph for this function:| void nav_init_stage | ( | void | ) |
needs to be implemented by fixedwing and rotorcraft seperately
Definition at line 169 of file navigation.c.
References RoverNavigation::last_pos, last_x, last_y, nav, nav_circle_radians, nav_circle_radians_no_rewind, nav_in_circle, nav_in_segment, nav_shift, stage_time, stateGetPositionEnu_f(), VECT3_COPY, EnuCoor_f::x, and EnuCoor_f::y.
Here is the call graph for this function:| bool nav_is_in_flight | ( | void | ) |
Definition at line 189 of file navigation.c.
References autopilot_in_flight().
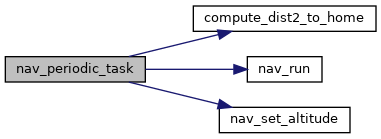
Here is the call graph for this function:| void nav_periodic_task | ( | void | ) |
Navigation main: call to the code generated from the XML flight plan.
Definition at line 176 of file navigation.c.
References block_time, circle_bank, compute_dist2_to_home(), dist2_to_wp, h_ctl_course_pre_bank, NAV_FREQ, nav_in_circle, nav_run(), nav_set_altitude(), nav_survey_active, stage_time, V_CTL_AUTO_THROTTLE_STANDARD, v_ctl_auto_throttle_submode, v_ctl_mode, and V_CTL_MODE_AUTO_CLIMB.
Here is the call graph for this function:| void nav_register_circle | ( | nav_rover_circle | nav_circle | ) |
Definition at line 297 of file navigation.c.
References nav, RoverNavigation::nav_circle, and nav_circle().
Referenced by nav_rover_init().
Here is the call graph for this function: Here is the caller graph for this function:| void nav_register_goto_wp | ( | nav_rover_goto | nav_goto, |
| nav_rover_route | nav_route, | ||
| nav_rover_approaching | nav_approaching | ||
| ) |
Register functions.
Registering functions.
Definition at line 290 of file navigation.c.
References nav, nav_approaching(), RoverNavigation::nav_approaching, nav_goto(), RoverNavigation::nav_goto, RoverNavigation::nav_route, and nav_route().
Referenced by nav_rover_init().
Here is the call graph for this function: Here is the caller graph for this function:| void nav_register_oval | ( | nav_rover_oval_init | nav_oval_init, |
| nav_rover_oval | nav_oval | ||
| ) |
Definition at line 302 of file navigation.c.
References nav, RoverNavigation::nav_oval, nav_oval(), RoverNavigation::nav_oval_init, and nav_oval_init().
Referenced by nav_rover_init().
Here is the call graph for this function: Here is the caller graph for this function:| void nav_reset_alt | ( | void | ) |
Definition at line 163 of file navigation.c.
References ins_reset_altitude_ref(), and waypoints_localize_all().
Here is the call graph for this function:| void nav_reset_reference | ( | void | ) |
Reset the geographic reference to the current GPS fix.
Definition at line 156 of file navigation.c.
References ins_reset_local_origin(), and waypoints_localize_all().
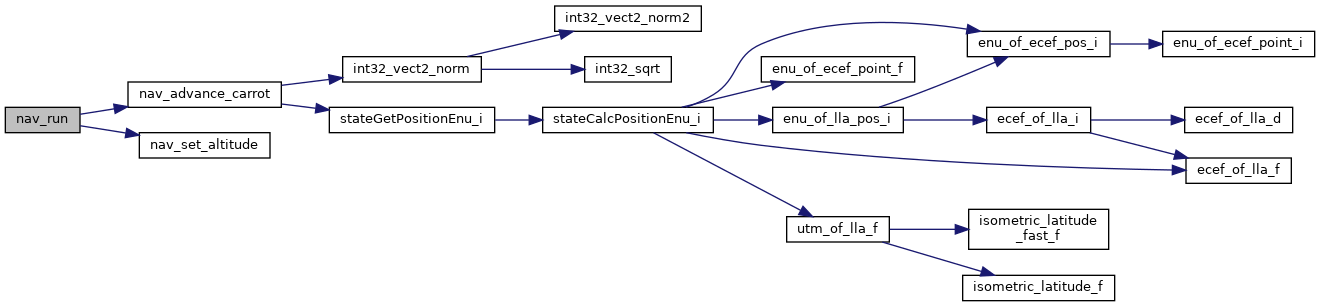
Here is the call graph for this function:| void nav_run | ( | void | ) |
Definition at line 109 of file navigation.c.
References RoverNavigation::carrot, nav, nav_advance_carrot(), nav_set_altitude(), navigation_carrot, navigation_target, RoverNavigation::target, and VECT2_COPY.
Here is the call graph for this function:| void nav_set_failsafe | ( | void | ) |
Definition at line 279 of file navigation.c.
References AP_MODE_FAILSAFE, and autopilot_set_mode().
Here is the call graph for this function:| void nav_set_heading_current | ( | void | ) |
Set heading to the current yaw angle.
Definition at line 274 of file navigation.c.
References RoverNavigation::heading, nav, nav_heading, FloatEulers::psi, Int32Eulers::psi, stateGetNedToBodyEulers_f(), and stateGetNedToBodyEulers_i().
Here is the call graph for this function:| void nav_set_heading_deg | ( | float | deg | ) |
Set nav_heading in degrees.
Definition at line 244 of file navigation.c.
References nav_set_heading_rad().
Here is the call graph for this function:| void nav_set_heading_rad | ( | float | rad | ) |
Set nav_heading in radians.
heading utility functions
Definition at line 237 of file navigation.c.
References ANGLE_BFP_OF_REAL, RoverNavigation::heading, INT32_COURSE_NORMALIZE, nav, nav_heading, and NormCourseRad.
| void nav_set_heading_towards | ( | float | x, |
| float | y | ||
| ) |
Set heading to point towards x,y position in local coordinates.
Definition at line 250 of file navigation.c.
References ANGLE_BFP_OF_REAL, f, RoverNavigation::heading, nav, nav_heading, pos_diff, stateGetPositionEnu_f(), target, VECT2_DIFF, VECT2_NORM2, FloatVect2::x, and FloatVect2::y.
Here is the call graph for this function:| void nav_set_heading_towards_target | ( | void | ) |
Set heading in the direction of the target.
Definition at line 268 of file navigation.c.
References nav, nav_set_heading_towards(), navigation_target, POS_FLOAT_OF_BFP, RoverNavigation::target, EnuCoor_f::x, EnuCoor_i::x, EnuCoor_f::y, and EnuCoor_i::y.
Here is the call graph for this function:| void nav_set_heading_towards_waypoint | ( | uint8_t | wp | ) |
Set heading in the direction of a waypoint.
Definition at line 262 of file navigation.c.
References nav_set_heading_towards(), WaypointX, and WaypointY.
Referenced by NavGotoWaypointHeading().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 67 of file navigation.c.
References dev, nb_waypoint, waypoints, point::x, and point::y.
Referenced by nav_init().
Here is the caller graph for this function:| void set_exception_flag | ( | uint8_t | flag_num | ) |
Definition at line 58 of file navigation.c.
References exception_flag, RoverNavigation::exception_flag, and nav.
| float failsafe_mode_dist2 = FAILSAFE_MODE_DISTANCE * FAILSAFE_MODE_DISTANCE |
maximum squared distance to home wp before going to failsafe mode
Definition at line 55 of file navigation.c.
| uint8_t last_wp |
Index of last waypoint.
Used only in "go" stage in "route" horiz mode
Definition at line 51 of file navigation.c.
| const float max_dist2_from_home = MAX_DIST_FROM_HOME * MAX_DIST_FROM_HOME |
Definition at line 54 of file navigation.c.
| const float max_dist_from_home = MAX_DIST_FROM_HOME |
Definition at line 53 of file navigation.c.
| struct RoverNavigation nav |
Definition at line 49 of file navigation.c.
Referenced by compute_dist2_to_home(), nav_circle(), nav_goto(), nav_home(), nav_init(), nav_init_stage(), nav_oval_init(), nav_register_circle(), nav_register_goto_wp(), nav_register_oval(), nav_route(), nav_run(), nav_set_heading_current(), nav_set_heading_rad(), nav_set_heading_towards(), nav_set_heading_towards_target(), NavApproaching(), NavApproachingFrom(), NavCircleWaypoint(), NavGotoWaypoint(), NavSegment(), Oval(), send_fp(), send_nav_status(), and set_exception_flag().
 1.8.17
1.8.17