|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
#include "modules/sensors/cameras/jevois_mavlink.h"#include <stdio.h>#include <mavlink/mavlink_types.h>#include "mavlink/paparazzi/mavlink.h"#include "subsystems/imu.h"#include "autopilot.h"#include "generated/modules.h"#include "subsystems/abi.h"#include "subsystems/abi_sender_ids.h"#include "std.h"#include "subsystems/datalink/telemetry.h"#include "filters/low_pass_filter.h"#include "state.h"#include "mcu_periph/sys_time.h" Include dependency graph for jevois_mavlink.c:
Include dependency graph for jevois_mavlink.c:Go to the source code of this file.
Data Structures | |
| struct | visual_target_struct |
| struct | vision_relative_position_struct |
Macros | |
| #define | DEBUG_PRINT printf |
| #define | MAVLINK_SYSID 1 |
| #define | JEVOIS_MAVLINK_ABI_ID 34 |
Functions | |
| static void | mavlink_send_heartbeat (void) |
| static void | mavlink_send_attitude (void) |
| static void | mavlink_send_highres_imu (void) |
| static void | mavlink_send_set_mode (void) |
| void | jevois_mavlink_filter_periodic (void) |
| void | jevois_mavlink_filter_init (void) |
| static void | send_jevois_mavlink_visual_target (struct transport_tx *trans, struct link_device *dev) |
| static void | send_jevois_mavlink_visual_position (struct transport_tx *trans, struct link_device *dev) |
| void | jevois_mavlink_init (void) |
| void | jevois_mavlink_periodic (void) |
| void | jevois_mavlink_event (void) |
Variables | |
| mavlink_system_t | mavlink_system |
| struct visual_target_struct | jevois_visual_target = {false, 0, 0, 0, 0, 0, 0} |
| struct vision_relative_position_struct | jevois_vision_position = {false, 0, 0.0f, 0.0f, 0.0f} |
| Butterworth2LowPass_int | ax_filtered |
| Butterworth2LowPass_int | ay_filtered |
| Butterworth2LowPass_int | az_filtered |
Definition in file jevois_mavlink.c.
| struct visual_target_struct |
Definition at line 70 of file jevois_mavlink.c.
| Data Fields | ||
|---|---|---|
| int | count | |
| int | h | |
| int | quality | |
| int | received | |
| int | source | |
| int | w | |
| int | x | |
| int | y | |
| struct vision_relative_position_struct |
Definition at line 123 of file detect_gate.c.
| Data Fields | ||
|---|---|---|
| int | cnt | |
| int | received | |
| float | x | |
| float | y | |
| float | z | |
| #define DEBUG_PRINT printf |
Definition at line 29 of file jevois_mavlink.c.
| #define JEVOIS_MAVLINK_ABI_ID 34 |
Definition at line 177 of file jevois_mavlink.c.
| #define MAVLINK_SYSID 1 |
Definition at line 54 of file jevois_mavlink.c.
| void jevois_mavlink_event | ( | void | ) |
Definition at line 182 of file jevois_mavlink.c.
References c(), vision_relative_position_struct::cnt, visual_target_struct::count, DEBUG_PRINT, visual_target_struct::h, heartbeat, JEVOIS_MAVLINK_ABI_ID, jevois_vision_position, jevois_visual_target, MAVLinkChAvailable, MAVLinkGetch, msg, visual_target_struct::quality, visual_target_struct::received, vision_relative_position_struct::received, visual_target_struct::source, status, visual_target_struct::w, visual_target_struct::x, vision_relative_position_struct::x, visual_target_struct::y, vision_relative_position_struct::y, and vision_relative_position_struct::z.
Here is the call graph for this function:| void jevois_mavlink_filter_init | ( | void | ) |
Definition at line 107 of file jevois_mavlink.c.
References Imu::accel_unscaled, ax_filtered, ay_filtered, az_filtered, imu, init_butterworth_2_low_pass_int(), Int32Vect3::x, Int32Vect3::y, and Int32Vect3::z.
Referenced by jevois_mavlink_init().
Here is the call graph for this function: Here is the caller graph for this function:| void jevois_mavlink_filter_periodic | ( | void | ) |
Definition at line 99 of file jevois_mavlink.c.
References Imu::accel, ax_filtered, ay_filtered, az_filtered, imu, update_butterworth_2_low_pass_int(), Int32Vect3::x, Int32Vect3::y, and Int32Vect3::z.
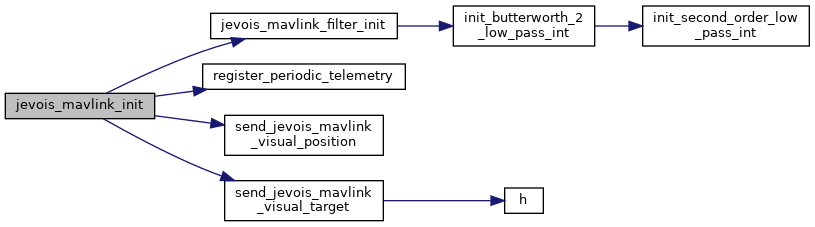
Here is the call graph for this function:| void jevois_mavlink_init | ( | void | ) |
Definition at line 154 of file jevois_mavlink.c.
References DefaultPeriodic, jevois_mavlink_filter_init(), MAVLINK_SYSID, mavlink_system, register_periodic_telemetry(), send_jevois_mavlink_visual_position(), and send_jevois_mavlink_visual_target().
Here is the call graph for this function:| void jevois_mavlink_periodic | ( | void | ) |
Definition at line 168 of file jevois_mavlink.c.
References mavlink_send_attitude(), mavlink_send_heartbeat(), mavlink_send_highres_imu(), and mavlink_send_set_mode().
Here is the call graph for this function:
|
static |
Definition at line 294 of file jevois_mavlink.c.
References get_sys_time_msec(), MAVLinkSendMessage, p, stateGetBodyRates_f(), and stateGetNedToBodyEulers_f().
Referenced by jevois_mavlink_periodic().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 318 of file jevois_mavlink.c.
References MAVLinkSendMessage.
Referenced by jevois_mavlink_periodic().
Here is the caller graph for this function:
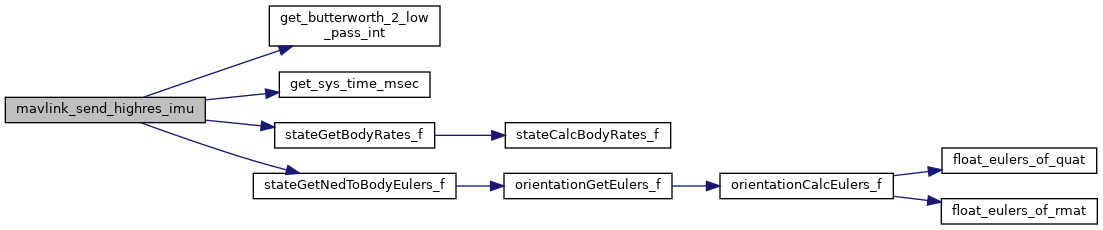
|
static |
Definition at line 330 of file jevois_mavlink.c.
References ax_filtered, ay_filtered, az_filtered, get_butterworth_2_low_pass_int(), get_sys_time_msec(), MAVLinkSendMessage, p, stateGetBodyRates_f(), and stateGetNedToBodyEulers_f().
Referenced by jevois_mavlink_periodic().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 308 of file jevois_mavlink.c.
References get_sys_time_msec(), and MAVLinkSendMessage.
Referenced by jevois_mavlink_periodic().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 135 of file jevois_mavlink.c.
References vision_relative_position_struct::cnt, dev, foo, jevois_vision_position, vision_relative_position_struct::received, vision_relative_position_struct::x, vision_relative_position_struct::y, and vision_relative_position_struct::z.
Referenced by jevois_mavlink_init().
Here is the caller graph for this function:
|
static |
Definition at line 120 of file jevois_mavlink.c.
References visual_target_struct::count, dev, visual_target_struct::h, h(), jevois_visual_target, visual_target_struct::received, s, visual_target_struct::source, visual_target_struct::w, visual_target_struct::x, and visual_target_struct::y.
Referenced by jevois_mavlink_init().
Here is the call graph for this function: Here is the caller graph for this function:| Butterworth2LowPass_int ax_filtered |
Definition at line 95 of file jevois_mavlink.c.
Referenced by jevois_mavlink_filter_init(), jevois_mavlink_filter_periodic(), and mavlink_send_highres_imu().
| Butterworth2LowPass_int ay_filtered |
Definition at line 96 of file jevois_mavlink.c.
Referenced by jevois_mavlink_filter_init(), jevois_mavlink_filter_periodic(), and mavlink_send_highres_imu().
| Butterworth2LowPass_int az_filtered |
Definition at line 97 of file jevois_mavlink.c.
Referenced by jevois_mavlink_filter_init(), jevois_mavlink_filter_periodic(), and mavlink_send_highres_imu().
| struct vision_relative_position_struct jevois_vision_position = {false, 0, 0.0f, 0.0f, 0.0f} |
Referenced by jevois_mavlink_event(), and send_jevois_mavlink_visual_position().
| struct visual_target_struct jevois_visual_target = {false, 0, 0, 0, 0, 0, 0} |
Referenced by jevois_mavlink_event(), and send_jevois_mavlink_visual_target().
| mavlink_system_t mavlink_system |
Definition at line 51 of file jevois_mavlink.c.
Referenced by jevois_mavlink_init().
 1.8.17
1.8.17