|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
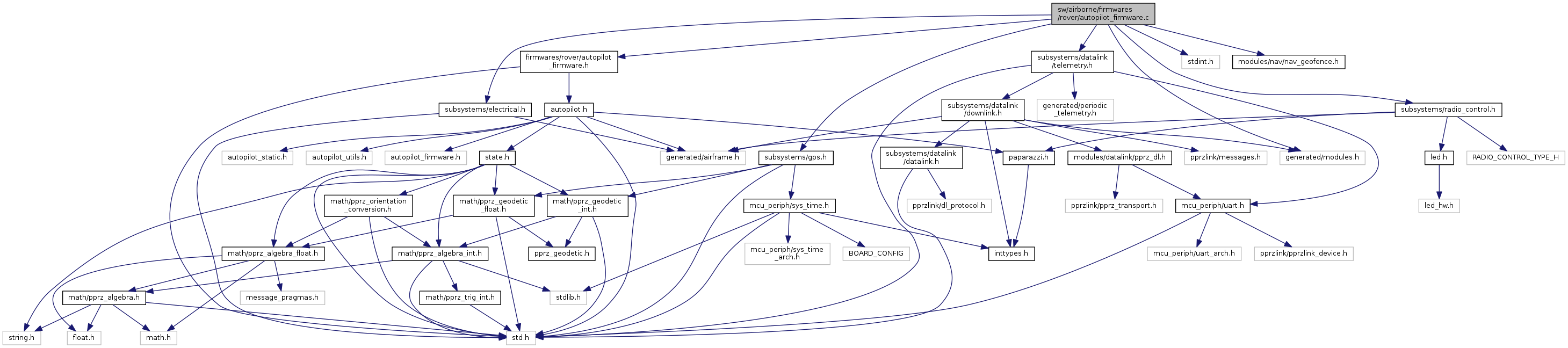
#include "firmwares/rover/autopilot_firmware.h"#include "generated/modules.h"#include <stdint.h>#include "subsystems/electrical.h"#include "subsystems/datalink/telemetry.h"#include "subsystems/radio_control.h"#include "subsystems/gps.h"#include "modules/nav/nav_geofence.h" Include dependency graph for autopilot_firmware.c:
Include dependency graph for autopilot_firmware.c:Go to the source code of this file.
Functions | |
| static void | send_status (struct transport_tx *trans, struct link_device *dev) |
| static void | send_energy (struct transport_tx *trans, struct link_device *dev) |
| static void | send_fp (struct transport_tx *trans, struct link_device *dev) |
| static void | send_rotorcraft_rc (struct transport_tx *trans, struct link_device *dev) |
| void | autopilot_firmware_init (void) |
| Init function. More... | |
| void | autopilot_event (void) |
| autopilot event function More... | |
| void autopilot_event | ( | void | ) |
autopilot event function
Autopilot event check function.
Definition at line 137 of file autopilot_firmware.c.
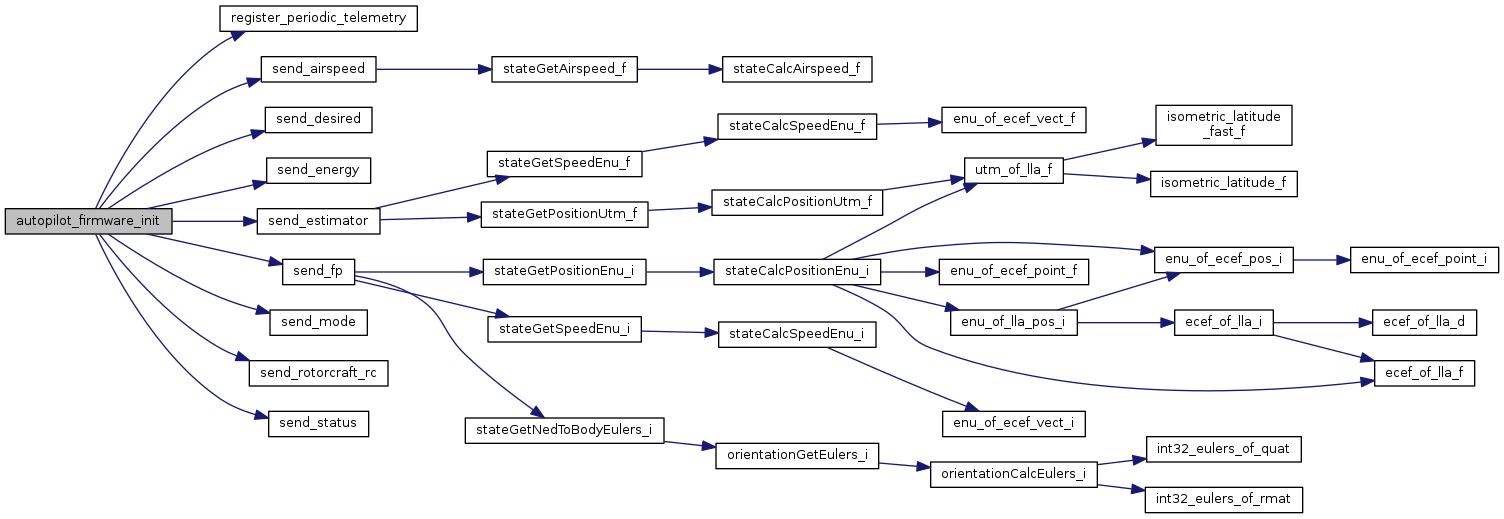
| void autopilot_firmware_init | ( | void | ) |
Init function.
Definition at line 123 of file autopilot_firmware.c.
References ap_electrical, Electrical::bat_critical, Electrical::bat_low, Electrical::charge, Electrical::current, DefaultPeriodic, Electrical::energy, register_periodic_telemetry(), send_airspeed(), send_desired(), send_energy(), send_estimator(), send_fp(), send_mode(), send_rotorcraft_rc(), send_status(), and Electrical::vsupply.
Here is the call graph for this function:
|
static |
Definition at line 70 of file autopilot_firmware.c.
References autopilot, Electrical::charge, Electrical::current, electrical, Electrical::energy, MAX_PPRZ, pprz_autopilot::throttle, and Electrical::vsupply.
Referenced by autopilot_firmware_init().
Here is the caller graph for this function:
|
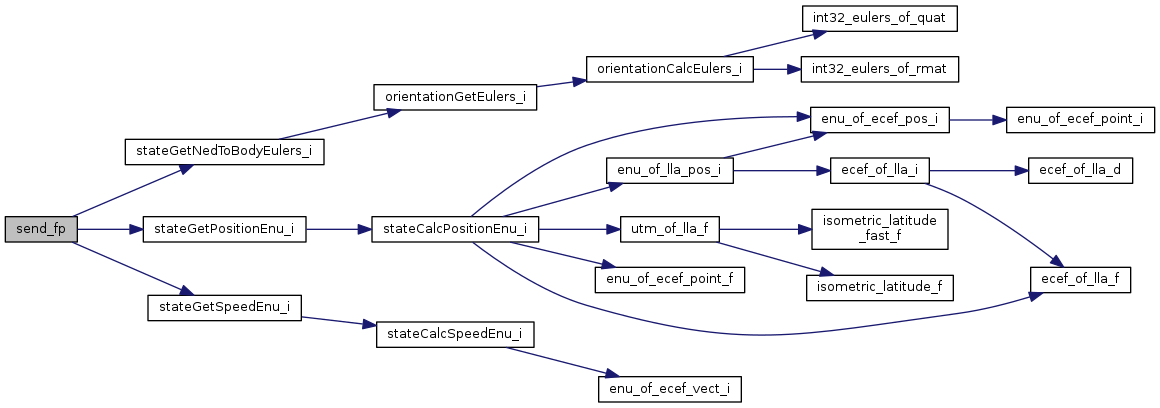
static |
Definition at line 78 of file autopilot_firmware.c.
References ANGLE_BFP_OF_REAL, autopilot, RoverNavigation::carrot, pprz_autopilot::flight_time, RoverNavigation::heading, nav, Int32Eulers::phi, POS_BFP_OF_REAL, Int32Eulers::psi, stateGetNedToBodyEulers_i(), stateGetPositionEnu_i(), stateGetSpeedEnu_i(), Int32Eulers::theta, pprz_autopilot::throttle, NedCoor_f::x, EnuCoor_f::x, EnuCoor_i::x, EnuCoor_f::y, EnuCoor_i::y, and EnuCoor_i::z.
Referenced by autopilot_firmware_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 105 of file autopilot_firmware.c.
References radio_control, RADIO_KILL_SWITCH, RADIO_MODE, RADIO_PITCH, RADIO_ROLL, RADIO_THROTTLE, RADIO_YAW, RadioControl::status, and RadioControl::values.
Referenced by autopilot_firmware_init().
Here is the caller graph for this function:
|
static |
Definition at line 55 of file autopilot_firmware.c.
References autopilot, electrical, GpsState::fix, RadioControl::frame_rate, gps, pprz_autopilot::mode, pprz_autopilot::motors_on, sys_time::nb_sec, radio_control, RadioControl::status, and Electrical::vsupply.
Referenced by autopilot_firmware_init().
Here is the caller graph for this function: 1.8.8
1.8.8