|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
Radio control input via datalink. More...
#include "std.h" Include dependency graph for rc_datalink.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for rc_datalink.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | RC_DL_NB_CHANNEL 5 |
| #define | RADIO_CONTROL_NB_CHANNEL RC_DL_NB_CHANNEL |
| #define | RADIO_ROLL 0 |
| Redefining RADIO_* Do not use with radio.h (ppm rc) More... | |
| #define | RADIO_PITCH 1 |
| #define | RADIO_YAW 2 |
| #define | RADIO_THROTTLE 3 |
| #define | RADIO_MODE 4 |
| #define | RadioControlEvent(_received_frame_handler) radio_control_impl_event(_received_frame_handler) |
| Event macro with handler callback. More... | |
Functions | |
| void | parse_rc_3ch_datalink (uint8_t throttle_mode, int8_t roll, int8_t pitch) |
| Decode datalink message to get rc values with RC_3CH message Mode and throttle are merge in the same byte. More... | |
| void | parse_rc_4ch_datalink (uint8_t mode, uint8_t throttle, int8_t roll, int8_t pitch, int8_t yaw) |
| Decode datalink message to get rc values with RC_4CH message. More... | |
| void | radio_control_impl_event (void(*_received_frame_handler)(void)) |
| RC event function with handler callback. More... | |
Variables | |
| int8_t | rc_dl_values [RC_DL_NB_CHANNEL] |
| volatile bool | rc_dl_frame_available |
Radio control input via datalink.
Definition in file rc_datalink.h.
| #define RADIO_CONTROL_NB_CHANNEL RC_DL_NB_CHANNEL |
Definition at line 33 of file rc_datalink.h.
| #define RADIO_MODE 4 |
Definition at line 43 of file rc_datalink.h.
| #define RADIO_PITCH 1 |
Definition at line 40 of file rc_datalink.h.
| #define RADIO_ROLL 0 |
Redefining RADIO_* Do not use with radio.h (ppm rc)
Definition at line 39 of file rc_datalink.h.
| #define RADIO_THROTTLE 3 |
Definition at line 42 of file rc_datalink.h.
| #define RADIO_YAW 2 |
Definition at line 41 of file rc_datalink.h.
| #define RadioControlEvent | ( | _received_frame_handler | ) | radio_control_impl_event(_received_frame_handler) |
Event macro with handler callback.
Definition at line 75 of file rc_datalink.h.
| #define RC_DL_NB_CHANNEL 5 |
Definition at line 32 of file rc_datalink.h.
Decode datalink message to get rc values with RC_3CH message Mode and throttle are merge in the same byte.
Definition at line 40 of file rc_datalink.c.
References mode, RADIO_MODE, RADIO_PITCH, RADIO_ROLL, RADIO_THROTTLE, RADIO_YAW, rc_dl_frame_available, and rc_dl_values.
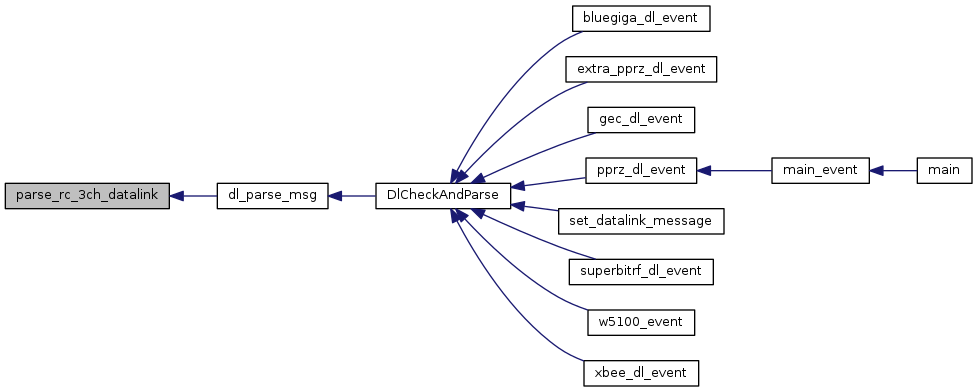
Referenced by dl_parse_msg().
Here is the caller graph for this function:| void parse_rc_4ch_datalink | ( | uint8_t | mode, |
| uint8_t | throttle, | ||
| int8_t | roll, | ||
| int8_t | pitch, | ||
| int8_t | yaw | ||
| ) |
Decode datalink message to get rc values with RC_4CH message.
Definition at line 56 of file rc_datalink.c.
References RADIO_MODE, RADIO_PITCH, RADIO_ROLL, RADIO_THROTTLE, RADIO_YAW, rc_dl_frame_available, and rc_dl_values.
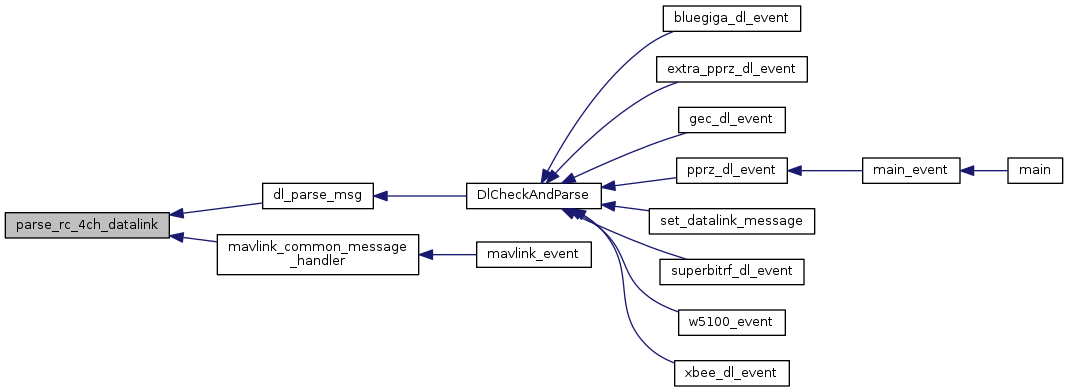
Referenced by dl_parse_msg(), and mavlink_common_message_handler().
Here is the caller graph for this function:| void radio_control_impl_event | ( | void(*)(void) | _received_frame_handler | ) |
| volatile bool rc_dl_frame_available |
Definition at line 31 of file rc_datalink.c.
Referenced by parse_rc_3ch_datalink(), parse_rc_4ch_datalink(), radio_control_impl_event(), and radio_control_impl_init().
| int8_t rc_dl_values[RC_DL_NB_CHANNEL] |
Definition at line 30 of file rc_datalink.c.
Referenced by parse_rc_3ch_datalink(), parse_rc_4ch_datalink(), and radio_control_impl_event().
 1.8.8
1.8.8