|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
efficient fixed-point optical-flow calculation More...
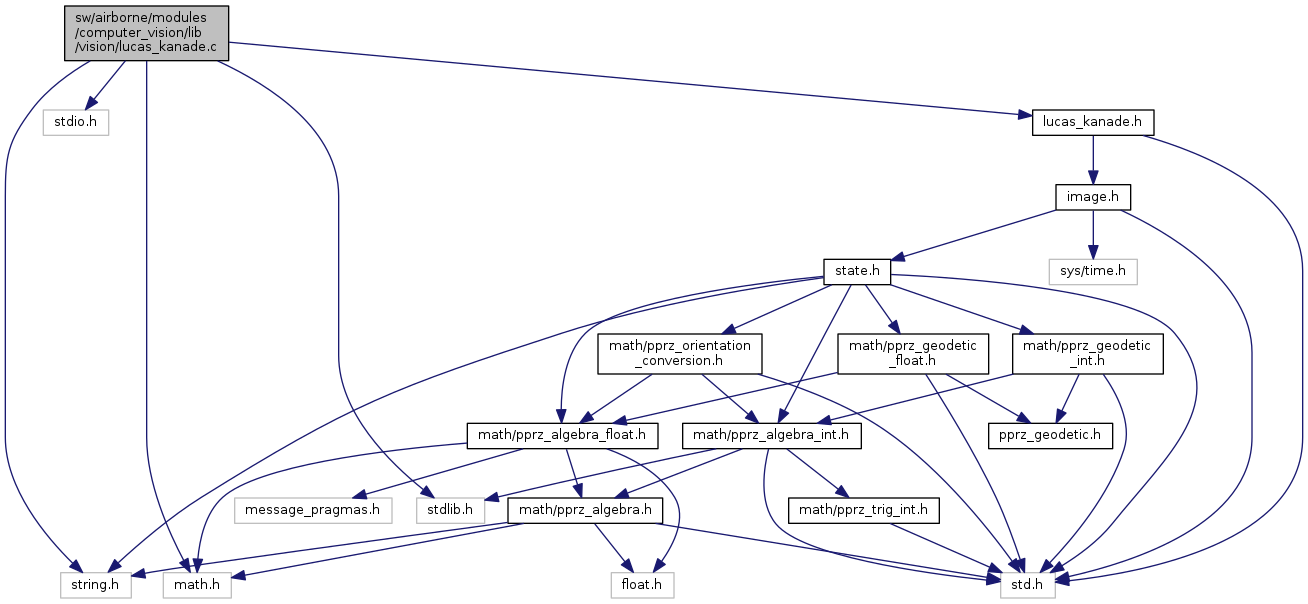
#include <stdlib.h>#include <stdio.h>#include <math.h>#include <string.h>#include "lucas_kanade.h" Include dependency graph for lucas_kanade.c:
Include dependency graph for lucas_kanade.c:Go to the source code of this file.
Functions | |
| struct flow_t * | opticFlowLK (struct image_t *new_img, struct image_t *old_img, struct point_t *points, uint16_t *points_cnt, uint16_t half_window_size, uint16_t subpixel_factor, uint8_t max_iterations, uint8_t step_threshold, uint8_t max_points, uint8_t pyramid_level, uint8_t keep_bad_points) |
| struct flow_t * | opticFlowLK_flat (struct image_t *new_img, struct image_t *old_img, struct point_t *points, uint16_t *points_cnt, uint16_t half_window_size, uint16_t subpixel_factor, uint8_t max_iterations, uint8_t step_threshold, uint16_t max_points, uint8_t keep_bad_points) |
| Compute the optical flow of several points using the Lucas-Kanade algorithm by Yves Bouguet The initial fixed-point implementation is doen by G. More... | |
efficient fixed-point optical-flow calculation
Compute the optical flow of several points using the pyramidal Lucas-Kanade algorithm by Yves Bouguet The initial fixed-point implementation is done by G.
Publication: http://robots.stanford.edu/cs223b04/algo_tracking.pdf
de Croon and is adapted by Freek van Tienen for the implementation in Paparazzi. Pyramids implementation and related development done by Hrvoje Brezak.
| [in] | *new_img | The newest grayscale image (TODO: fix YUV422 support) |
| [in] | *old_img | The old grayscale image (TODO: fix YUV422 support) |
| [in] | *points | Points to start tracking from |
| [in,out] | points_cnt | The amount of points and it returns the amount of points tracked |
| [in] | half_window_size | Half the window size (in both x and y direction) to search inside |
| [in] | subpixel_factor | The subpixel factor which calculations should be based on |
| [in] | max_iterations | Maximum amount of iterations to find the new point |
| [in] | step_threshold | The threshold of additional subpixel flow at which the iterations should stop |
| [in] | max_points | The maximum amount of points to track, we skip x points and then take a point. |
| [in] | pyramid_level | Level of pyramid used in computation (0 == no pyramids used) |
| [in] | keep_bad_points | Do not filter out bad points. The error field will be set accordingly. |
Pyramidal implementation of Lucas-Kanade feature tracker.
Uses input images to build pyramid of padded images.
For every pyramid level:
For all points:
Definition in file lucas_kanade.c.
| struct flow_t* opticFlowLK | ( | struct image_t * | new_img, |
| struct image_t * | old_img, | ||
| struct point_t * | points, | ||
| uint16_t * | points_cnt, | ||
| uint16_t | half_window_size, | ||
| uint16_t | subpixel_factor, | ||
| uint8_t | max_iterations, | ||
| uint8_t | step_threshold, | ||
| uint8_t | max_points, | ||
| uint8_t | pyramid_level, | ||
| uint8_t | keep_bad_points | ||
| ) |
Definition at line 74 of file lucas_kanade.c.
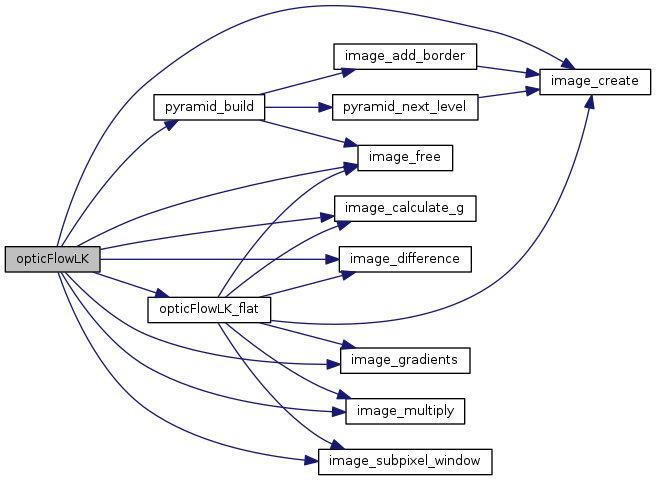
References flow_t::error, flow_t::flow_x, flow_t::flow_y, image_t::h, image_calculate_g(), image_create(), image_difference(), image_free(), IMAGE_GRADIENT, image_gradients(), IMAGE_GRAYSCALE, image_multiply(), image_subpixel_window(), LARGE_FLOW_ERROR, opticFlowLK_flat(), p, patch_size, flow_t::pos, pyramid_build(), image_t::w, point_t::x, and point_t::y.
Referenced by calc_fast9_lukas_kanade().
Here is the call graph for this function: Here is the caller graph for this function:| struct flow_t* opticFlowLK_flat | ( | struct image_t * | new_img, |
| struct image_t * | old_img, | ||
| struct point_t * | points, | ||
| uint16_t * | points_cnt, | ||
| uint16_t | half_window_size, | ||
| uint16_t | subpixel_factor, | ||
| uint8_t | max_iterations, | ||
| uint8_t | step_threshold, | ||
| uint16_t | max_points, | ||
| uint8_t | keep_bad_points | ||
| ) |
Compute the optical flow of several points using the Lucas-Kanade algorithm by Yves Bouguet The initial fixed-point implementation is doen by G.
de Croon and is adapted by Freek van Tienen for the implementation in Paparazzi.
| [in] | *new_img | The newest grayscale image (TODO: fix YUV422 support) |
| [in] | *old_img | The old grayscale image (TODO: fix YUV422 support) |
| [in] | *points | Points to start tracking from |
| in/out] | points_cnt The amount of points and it returns the amount of points tracked | |
| [in] | half_window_size | Half the window size (in both x and y direction) to search inside |
| [in] | subpixel_factor | The subpixel factor which calculations should be based on |
| [in] | max_iteration | Maximum amount of iterations to find the new point |
| [in] | step_threshold | The threshold at which the iterations should stop |
| [in] | max_point | The maximum amount of points to track, we skip x points and then take a point. |
Definition at line 275 of file lucas_kanade.c.
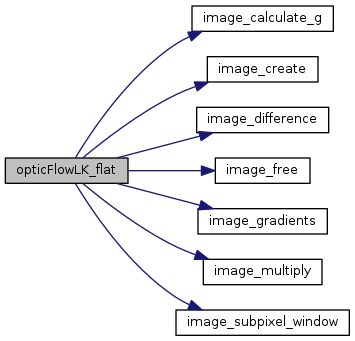
References flow_t::error, FALSE, flow_t::flow_x, flow_t::flow_y, image_t::h, image_calculate_g(), image_create(), image_difference(), image_free(), IMAGE_GRADIENT, image_gradients(), IMAGE_GRAYSCALE, image_multiply(), image_subpixel_window(), LARGE_FLOW_ERROR, p, patch_size, flow_t::pos, TRUE, image_t::w, point_t::x, and point_t::y.
Referenced by opticFlowLK().
Here is the call graph for this function: Here is the caller graph for this function: 1.8.8
1.8.8