|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
AP ( AutoPilot ) process API. More...
 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| void | init_ap (void) |
| void | handle_periodic_tasks_ap (void) |
| void | event_task_ap (void) |
| void | sensors_task (void) |
| Run at PERIODIC_FREQUENCY (60Hz if not defined) More... | |
| void | monitor_task (void) |
| monitor stuff run at 1Hz More... | |
| void | reporting_task (void) |
| Send a series of initialisation messages followed by a stream of periodic ones. More... | |
AP ( AutoPilot ) process API.
Definition in file main_ap.h.
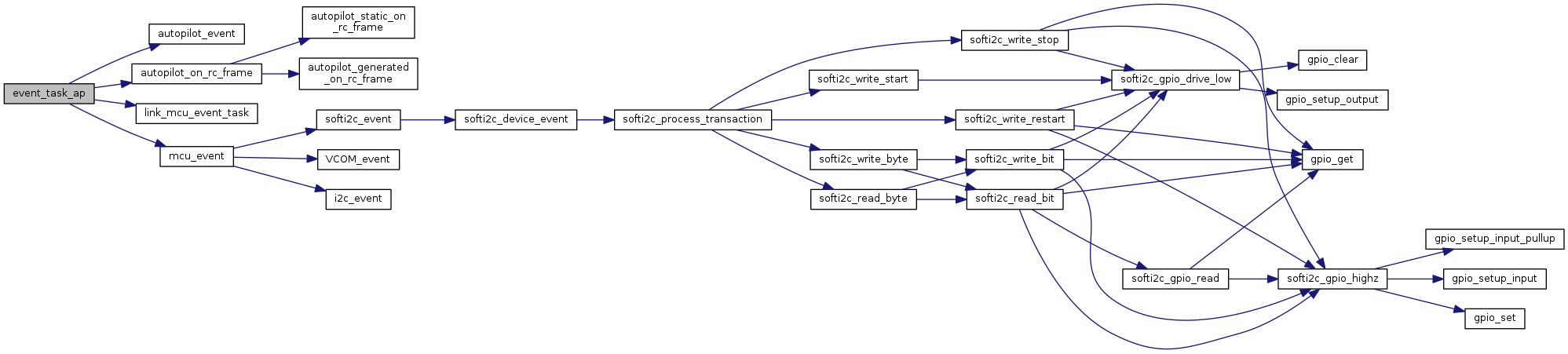
| void event_task_ap | ( | void | ) |
Definition at line 369 of file main_ap.c.
References autopilot_event(), autopilot_on_rc_frame(), BaroEvent, inter_mcu_received_fbw, link_mcu_event_task(), and mcu_event().
Referenced by sim_periodic_task().
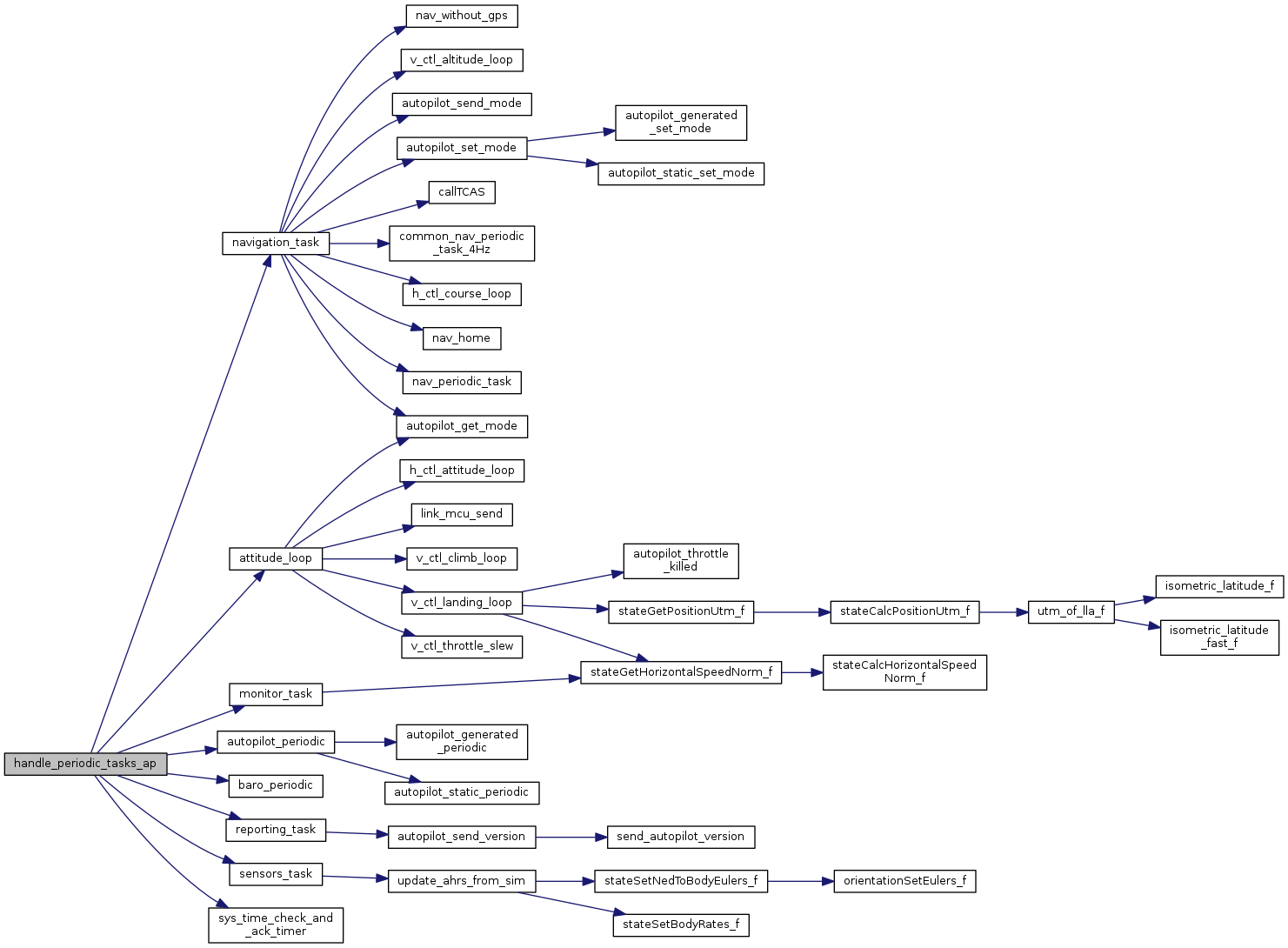
Here is the call graph for this function: Here is the caller graph for this function:| void handle_periodic_tasks_ap | ( | void | ) |
Definition at line 229 of file main_ap.c.
References attitude_loop(), autopilot_periodic(), baro_periodic(), LED_PERIODIC, monitor_task(), navigation_task(), reporting_task(), sensors_task(), and sys_time_check_and_ack_timer().
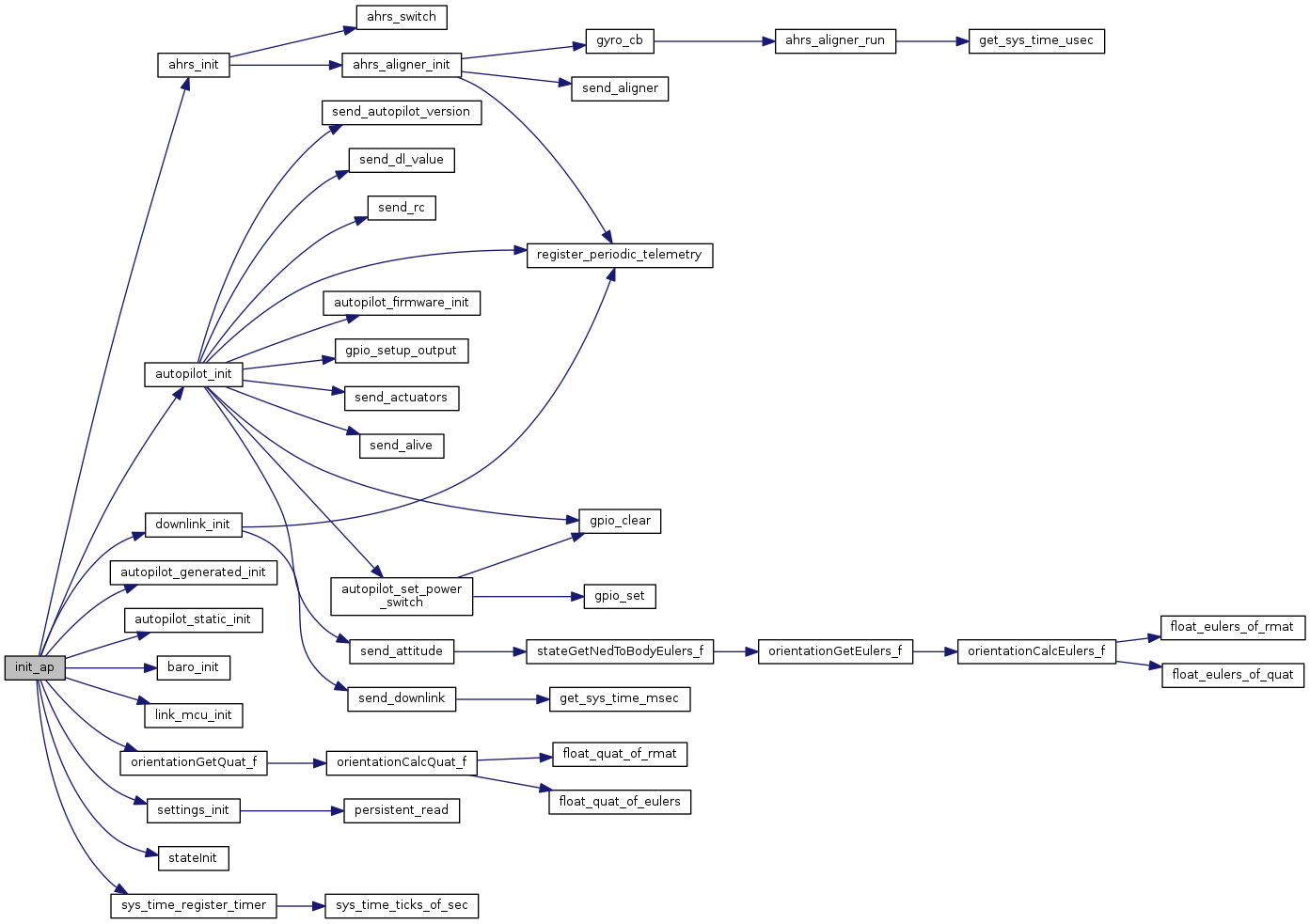
Here is the call graph for this function:| void init_ap | ( | void | ) |
init done in main_fbw in single MCU
Definition at line 149 of file main_ap.c.
References ahrs_init(), ap_state, autopilot_generated_init(), autopilot_init(), autopilot_static_init(), baro_init(), BARO_PERIODIC_FREQUENCY, Imu::body_to_imu, COMMAND_PITCH_TRIM, COMMAND_ROLL_TRIM, COMMAND_YAW_TRIM, CONTROL_FREQUENCY, downlink_init(), imu, link_mcu_init(), mcu_int_enable, NAVIGATION_FREQUENCY, orientationGetQuat_f(), PPRZ_MUTEX_LOCK, PPRZ_MUTEX_UNLOCK, settings_init(), stateInit(), sys_time_register_timer(), and TELEMETRY_FREQUENCY.
Referenced by sim_init().
Here is the call graph for this function: Here is the caller graph for this function:| void monitor_task | ( | void | ) |
monitor stuff run at 1Hz
Definition at line 334 of file main_ap.c.
References ap_electrical, autopilot, CATASTROPHIC_BAT_KILL_DELAY, datalink_time, DefaultChannel, DefaultDevice, dist2_to_home, pprz_autopilot::flight_time, KILL_MODE_DISTANCE, pprz_autopilot::kill_throttle, pprz_autopilot::launch, MIN_SPEED_FOR_TAKEOFF, sys_time::nb_sec, Square, stateGetHorizontalSpeedNorm_f(), and Electrical::vsupply.
Referenced by handle_periodic_tasks_ap(), and sim_monitor_task().
Here is the call graph for this function: Here is the caller graph for this function:| void reporting_task | ( | void | ) |
Send a series of initialisation messages followed by a stream of periodic ones.
Called at 60Hz.
Definition at line 283 of file main_ap.c.
References autopilot_send_version(), DefaultChannel, DefaultDevice, and DefaultPeriodic.
Referenced by handle_periodic_tasks_ap(), and sim_periodic_task().
Here is the call graph for this function: Here is the caller graph for this function:| void sensors_task | ( | void | ) |
Run at PERIODIC_FREQUENCY (60Hz if not defined)
Definition at line 306 of file main_ap.c.
References update_ahrs_from_sim().
Referenced by handle_periodic_tasks_ap(), and sim_periodic_task().
Here is the call graph for this function: Here is the caller graph for this function: 1.8.8
1.8.8