|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.15_devel-230-gc96ce27
Paparazzi is a free software Unmanned Aircraft System.
|
Automatically arm the motors when applying throttle. More...
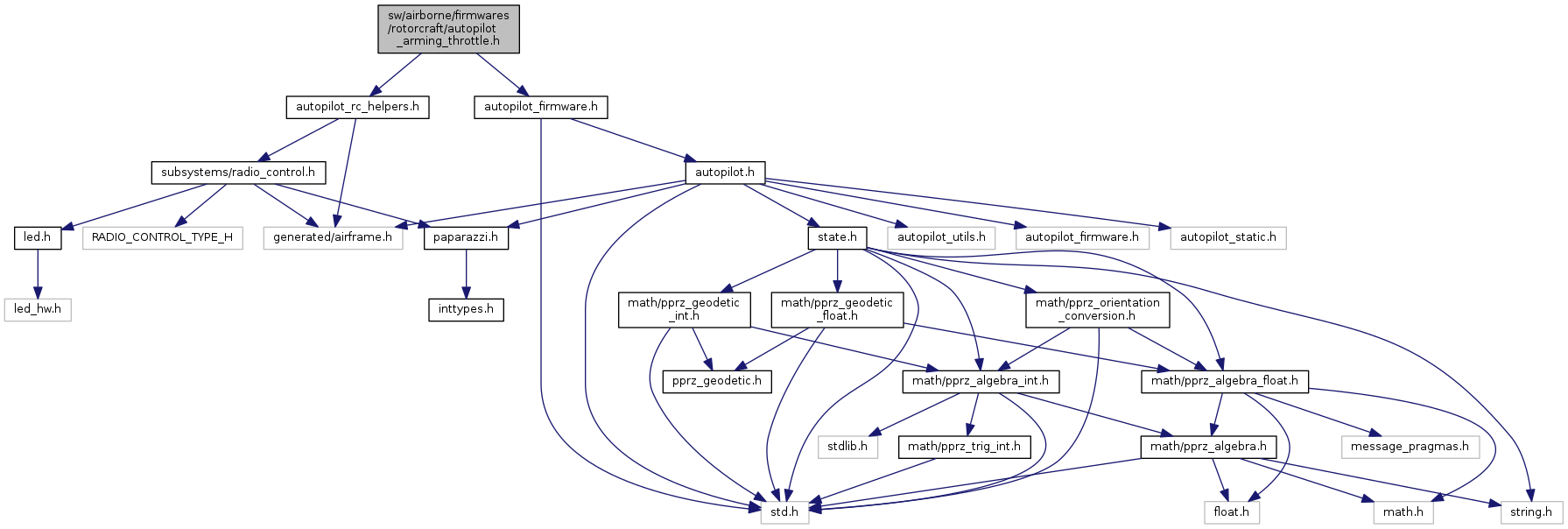
 Include dependency graph for autopilot_arming_throttle.h:
Include dependency graph for autopilot_arming_throttle.h:Go to the source code of this file.
Macros | |
| #define | AUTOPILOT_ARMING_DELAY 10 |
Enumerations | |
| enum | arming_throttle_state { STATE_UNINIT, STATE_WAITING, STATE_MOTORS_OFF_READY, STATE_ARMING, STATE_MOTORS_ON, STATE_UNARMING } |
Functions | |
| static void | autopilot_arming_init (void) |
| static void | autopilot_arming_set (bool motors_on) |
| static bool | autopilot_arming_check_valid (void) |
| Checks all arm requirements and returns true if OK and false otherwise. More... | |
| static void | autopilot_arming_check_motors_on (void) |
| State machine to check if motors should be turned ON or OFF. More... | |
Variables | |
| enum arming_throttle_state | autopilot_arming_state |
| uint8_t | autopilot_arming_delay_counter |
| bool | autopilot_unarmed_in_auto |
Automatically arm the motors when applying throttle.
Definition in file autopilot_arming_throttle.h.
| #define AUTOPILOT_ARMING_DELAY 10 |
Definition at line 35 of file autopilot_arming_throttle.h.
Referenced by autopilot_arming_check_motors_on().
| Enumerator | |
|---|---|
| STATE_UNINIT | |
| STATE_WAITING | |
| STATE_MOTORS_OFF_READY | |
| STATE_ARMING | |
| STATE_MOTORS_ON | |
| STATE_UNARMING | |
Definition at line 37 of file autopilot_arming_throttle.h.
|
inlinestatic |
State machine to check if motors should be turned ON or OFF.
Definition at line 98 of file autopilot_arming_throttle.h.
References AP_ARMING_STATUS_ARMED, AP_ARMING_STATUS_ARMING, AP_ARMING_STATUS_DISARMING, AP_ARMING_STATUS_KILLED, AP_ARMING_STATUS_THROTTLE_NOT_DOWN, AP_MODE_KILL, pprz_autopilot::arming_status, autopilot, autopilot_arming_check_valid(), AUTOPILOT_ARMING_DELAY, autopilot_arming_delay_counter, autopilot_arming_state, autopilot_get_mode(), autopilot_unarmed_in_auto, MODE_MANUAL, pprz_autopilot::motors_on, STATE_ARMING, STATE_MOTORS_OFF_READY, STATE_MOTORS_ON, STATE_UNARMING, STATE_UNINIT, STATE_WAITING, and THROTTLE_STICK_DOWN.
Here is the call graph for this function:
|
inlinestatic |
Checks all arm requirements and returns true if OK and false otherwise.
Also sets the arming status to provide information to the user
Definition at line 73 of file autopilot_arming_throttle.h.
References AP_ARMING_STATUS_NOT_MODE_MANUAL, AP_ARMING_STATUS_PITCH_NOT_CENTERED, AP_ARMING_STATUS_ROLL_NOT_CENTERED, AP_ARMING_STATUS_THROTTLE_DOWN, AP_ARMING_STATUS_YAW_NOT_CENTERED, pprz_autopilot::arming_status, autopilot, autopilot_get_mode(), autopilot_unarmed_in_auto, MODE_MANUAL, PITCH_STICK_CENTERED, ROLL_STICK_CENTERED, THROTTLE_STICK_DOWN, and YAW_STICK_CENTERED.
Referenced by autopilot_arming_check_motors_on().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Definition at line 50 of file autopilot_arming_throttle.h.
References autopilot_arming_delay_counter, autopilot_arming_state, autopilot_unarmed_in_auto, and STATE_UNINIT.
|
inlinestatic |
Definition at line 57 of file autopilot_arming_throttle.h.
References autopilot_arming_state, STATE_MOTORS_ON, and STATE_WAITING.
| uint8_t autopilot_arming_delay_counter |
Definition at line 47 of file autopilot_arming_throttle.h.
Referenced by autopilot_arming_check_motors_on(), and autopilot_arming_init().
| enum arming_throttle_state autopilot_arming_state |
Definition at line 46 of file autopilot_arming_throttle.h.
Referenced by autopilot_arming_check_motors_on(), autopilot_arming_init(), and autopilot_arming_set().
| bool autopilot_unarmed_in_auto |
Definition at line 48 of file autopilot_arming_throttle.h.
Referenced by autopilot_arming_check_motors_on(), autopilot_arming_check_valid(), and autopilot_arming_init().
 1.8.8
1.8.8