|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
MAVLab Delft University of Technology This control algorithm is Incremental Nonlinear Dynamic Inversion (INDI) More...
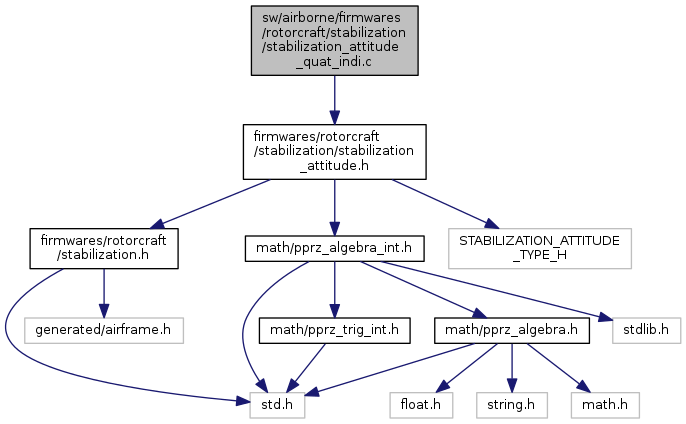
 Include dependency graph for stabilization_attitude_quat_indi.c:
Include dependency graph for stabilization_attitude_quat_indi.c:Go to the source code of this file.
Functions | |
| void | stabilization_attitude_init (void) |
| stabilization_attitude_init More... | |
| void | stabilization_attitude_enter (void) |
| void | stabilization_attitude_set_failsafe_setpoint (void) |
| void | stabilization_attitude_set_rpy_setpoint_i (struct Int32Eulers *rpy) |
| void | stabilization_attitude_set_earth_cmd_i (struct Int32Vect2 *cmd, int32_t heading) |
| void | stabilization_attitude_run (bool in_flight) |
| void | stabilization_attitude_read_rc (bool in_flight, bool in_carefree, bool coordinated_turn) |
MAVLab Delft University of Technology This control algorithm is Incremental Nonlinear Dynamic Inversion (INDI)
This is an implementation of the publication in the journal of Control Guidance and Dynamics: Adaptive Incremental Nonlinear Dynamic Inversion for Attitude Control of Micro Aerial Vehicles
This is an implementation of the publication in the journal of Control Guidance and Dynamics: Adaptive Incremental Nonlinear Dynamic Inversion for Attitude Control of Micro Aerial Vehicles http://arc.aiaa.org/doi/pdf/10.2514/1.G001490
Definition in file stabilization_attitude_quat_indi.c.
| void stabilization_attitude_enter | ( | void | ) |
Definition at line 43 of file stabilization_attitude_quat_indi.c.
References stabilization_indi_enter().
Here is the call graph for this function:| void stabilization_attitude_init | ( | void | ) |
stabilization_attitude_init
Initialize the heli indi attitude controller.
Definition at line 35 of file stabilization_attitude_quat_indi.c.
References stabilization_indi_init().
Here is the call graph for this function:| void stabilization_attitude_read_rc | ( | bool | in_flight, |
| bool | in_carefree, | ||
| bool | coordinated_turn | ||
| ) |
Definition at line 68 of file stabilization_attitude_quat_indi.c.
References stabilization_indi_read_rc().
Here is the call graph for this function:| void stabilization_attitude_run | ( | bool | in_flight | ) |
Definition at line 63 of file stabilization_attitude_quat_indi.c.
References FALSE, and stabilization_indi_run().
Here is the call graph for this function:| void stabilization_attitude_set_earth_cmd_i | ( | struct Int32Vect2 * | cmd, |
| int32_t | heading | ||
| ) |
Definition at line 58 of file stabilization_attitude_quat_indi.c.
References stabilization_indi_set_earth_cmd_i().
Here is the call graph for this function:| void stabilization_attitude_set_failsafe_setpoint | ( | void | ) |
Definition at line 48 of file stabilization_attitude_quat_indi.c.
References stabilization_indi_set_failsafe_setpoint().
Here is the call graph for this function:| void stabilization_attitude_set_rpy_setpoint_i | ( | struct Int32Eulers * | rpy | ) |
Definition at line 53 of file stabilization_attitude_quat_indi.c.
References stabilization_indi_set_rpy_setpoint_i().
Here is the call graph for this function: 1.8.8
1.8.8