|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
Baro board interface for Bosch BMP185 on Navstik I2C3 without EOC check. More...
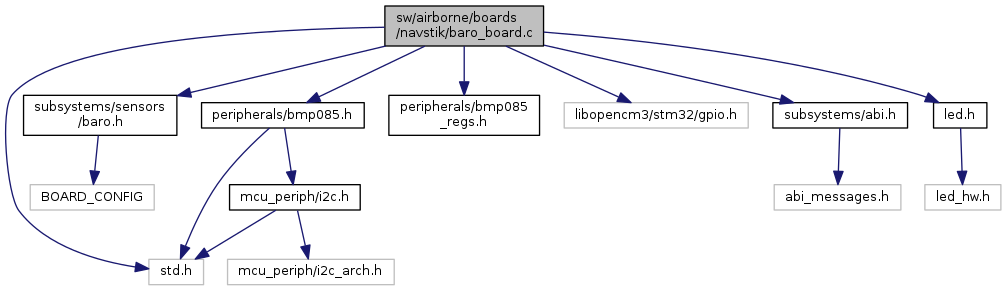
#include "std.h"#include "subsystems/sensors/baro.h"#include "peripherals/bmp085.h"#include "peripherals/bmp085_regs.h"#include <libopencm3/stm32/gpio.h>#include "subsystems/abi.h"#include "led.h" Include dependency graph for baro_board.c:
Include dependency graph for baro_board.c:Go to the source code of this file.
Functions | |
| void | baro_init (void) |
| void | baro_periodic (void) |
| void | baro_event (void) |
Variables | |
| struct Bmp085 | baro_bmp085 |
Baro board interface for Bosch BMP185 on Navstik I2C3 without EOC check.
Definition in file baro_board.c.
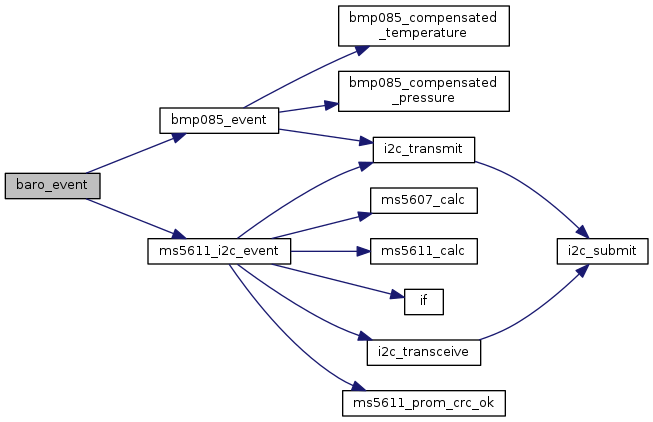
| void baro_event | ( | void | ) |
Definition at line 57 of file baro_board.c.
References baro_bmp085, BARO_BOARD_SENDER_ID, bb_ms5611, bmp085_event(), Ms5611Data::d1, Ms5611Data::d2, Ms5611_I2c::data, Ms5611_I2c::data_available, Bmp085::data_available, DefaultChannel, DefaultDevice, fbaroms, LED_TOGGLE, ms5611_i2c_event(), sys_time::nb_sec, Ms5611Data::pressure, Bmp085::pressure, Ms5611Data::temperature, and Bmp085::temperature.
Here is the call graph for this function:| void baro_init | ( | void | ) |
Definition at line 39 of file baro_board.c.
References baro_bmp085, bmp085_init(), BMP085_SLAVE_ADDR, and LED_OFF.
Here is the call graph for this function:| void baro_periodic | ( | void | ) |
Definition at line 48 of file baro_board.c.
References baro_bmp085, bmp085_periodic(), bmp085_read_eeprom_calib(), and Bmp085::initialized.
Here is the call graph for this function:| struct Bmp085 baro_bmp085 |
Definition at line 37 of file baro_board.c.
 1.8.8
1.8.8