|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
Driver for the IMU on the Apogee board. More...
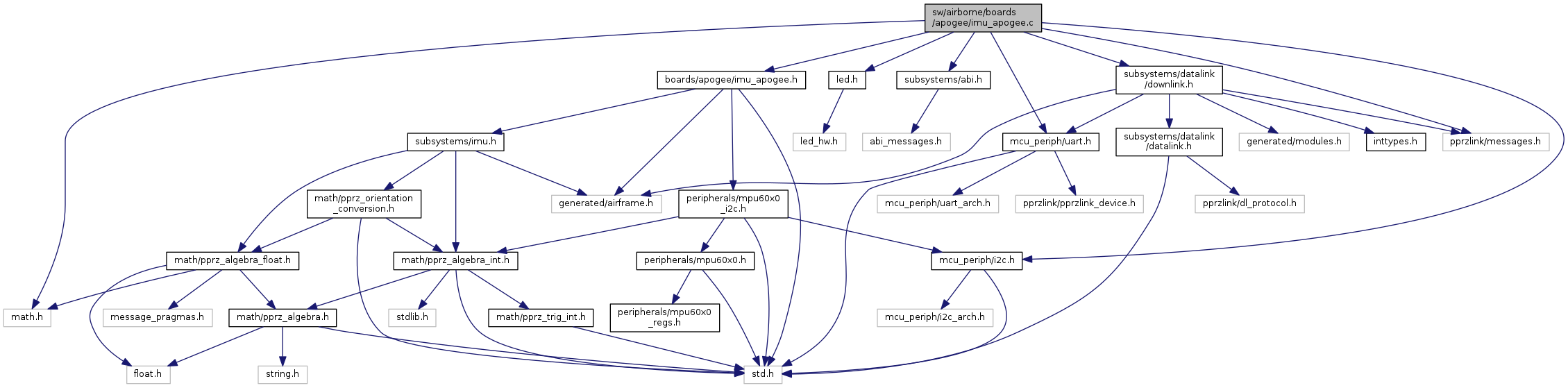
#include <math.h>#include "boards/apogee/imu_apogee.h"#include "mcu_periph/i2c.h"#include "led.h"#include "subsystems/abi.h"#include "mcu_periph/uart.h"#include "pprzlink/messages.h"#include "subsystems/datalink/downlink.h" Include dependency graph for imu_apogee.c:
Include dependency graph for imu_apogee.c:Go to the source code of this file.
Macros | |
| #define | IMU_APOGEE_CHAN_X 0 |
| #define | IMU_APOGEE_CHAN_Y 1 |
| #define | IMU_APOGEE_CHAN_Z 2 |
| #define | APOGEE_LOWPASS_FILTER MPU60X0_DLPF_42HZ |
| #define | APOGEE_SMPLRT_DIV 9 |
| #define | APOGEE_GYRO_RANGE MPU60X0_GYRO_RANGE_1000 |
| #define | APOGEE_ACCEL_RANGE MPU60X0_ACCEL_RANGE_8G |
Functions | |
| bool | configure_baro_slave (Mpu60x0ConfigSet mpu_set, void *mpu) |
| void | imu_apogee_init (void) |
| void | imu_apogee_periodic (void) |
| void | imu_apogee_downlink_raw (void) |
| void | imu_apogee_event (void) |
Variables | |
| struct ImuApogee | imu_apogee |
| #define APOGEE_ACCEL_RANGE MPU60X0_ACCEL_RANGE_8G |
Definition at line 65 of file imu_apogee.c.
Referenced by imu_apogee_init().
| #define APOGEE_GYRO_RANGE MPU60X0_GYRO_RANGE_1000 |
Definition at line 60 of file imu_apogee.c.
Referenced by imu_apogee_init().
| #define APOGEE_LOWPASS_FILTER MPU60X0_DLPF_42HZ |
Definition at line 52 of file imu_apogee.c.
Referenced by imu_apogee_init().
| #define APOGEE_SMPLRT_DIV 9 |
Definition at line 53 of file imu_apogee.c.
Referenced by imu_apogee_init().
| #define IMU_APOGEE_CHAN_X 0 |
Definition at line 42 of file imu_apogee.c.
Referenced by imu_apogee_event().
| #define IMU_APOGEE_CHAN_Y 1 |
Definition at line 45 of file imu_apogee.c.
Referenced by imu_apogee_event().
| #define IMU_APOGEE_CHAN_Z 2 |
Definition at line 48 of file imu_apogee.c.
Referenced by imu_apogee_event().
| bool configure_baro_slave | ( | Mpu60x0ConfigSet | mpu_set, |
| void * | mpu | ||
| ) |
Definition at line 96 of file imu_apogee.c.
Referenced by imu_apogee_init().
Here is the caller graph for this function:| void imu_apogee_downlink_raw | ( | void | ) |
Definition at line 136 of file imu_apogee.c.
References Imu::accel_unscaled, DefaultChannel, DefaultDevice, Imu::gyro_unscaled, imu, Int32Rates::p, Int32Rates::q, Int32Rates::r, Int32Vect3::x, Int32Vect3::y, and Int32Vect3::z.
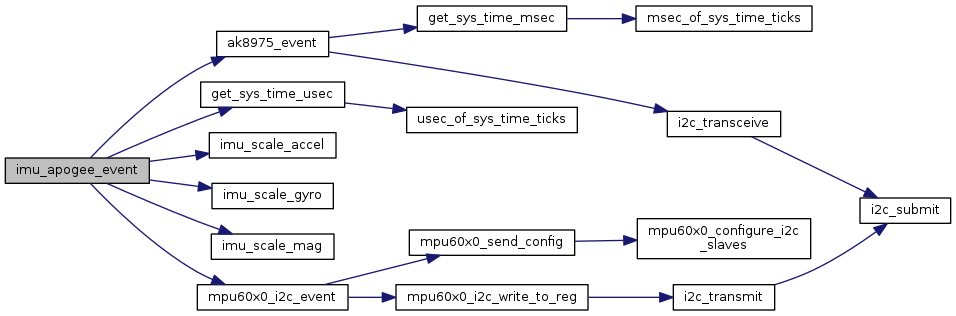
| void imu_apogee_event | ( | void | ) |
Definition at line 145 of file imu_apogee.c.
References Imu::accel, Imu::accel_unscaled, ak8975_event(), Mpu60x0_I2c::data_accel, Mpu60x0_I2c::data_available, Mpu60x0_I2c::data_rates, get_sys_time_usec(), Imu::gyro, Imu::gyro_unscaled, imu, imu_apogee, IMU_APOGEE_CHAN_X, IMU_APOGEE_CHAN_Y, IMU_APOGEE_CHAN_Z, IMU_BOARD_ID, imu_scale_accel(), imu_scale_gyro(), imu_scale_mag(), Imu::mag, Imu::mag_unscaled, ImuApogee::mpu, mpu60x0_i2c_event(), RATES_COPY, and VECT3_COPY.
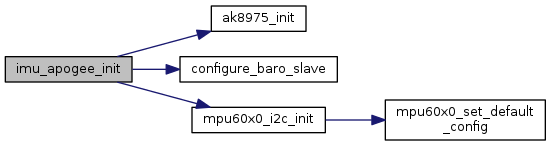
Here is the call graph for this function:| void imu_apogee_init | ( | void | ) |
Definition at line 101 of file imu_apogee.c.
References Mpu60x0Config::accel_range, AK8975_I2C_SLV_ADDR, ak8975_init(), APOGEE_ACCEL_RANGE, APOGEE_GYRO_RANGE, APOGEE_LOWPASS_FILTER, APOGEE_SMPLRT_DIV, Mpu60x0_I2c::config, Mpu60x0I2cSlave::configure, configure_baro_slave(), Mpu60x0Config::dlpf_cfg, Mpu60x0Config::gyro_range, Mpu60x0Config::i2c_bypass, imu_apogee, ImuApogee::mpu, MPU60X0_ADDR_ALT, mpu60x0_i2c_init(), Mpu60x0Config::nb_slaves, Mpu60x0Config::slaves, and Mpu60x0Config::smplrt_div.
Here is the call graph for this function:| void imu_apogee_periodic | ( | void | ) |
Definition at line 123 of file imu_apogee.c.
References ak8975_periodic(), imu_apogee, ImuApogee::mpu, and mpu60x0_i2c_periodic().
Here is the call graph for this function:| struct ImuApogee imu_apogee |
Definition at line 92 of file imu_apogee.c.
Referenced by baro_periodic(), imu_apogee_event(), imu_apogee_init(), and imu_apogee_periodic().
 1.8.8
1.8.8