|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
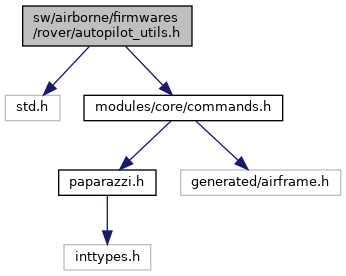
Utility functions and includes for autopilots. More...
 Include dependency graph for autopilot_utils.h:
Include dependency graph for autopilot_utils.h:Go to the source code of this file.
Macros | |
| #define | SetRotorcraftCommands(_cmd, _in_flight, _motors_on) set_rotorcraft_commands(commands, _cmd, _in_flight, _motors_on) |
Functions | |
| uint8_t | ap_mode_of_3way_switch (void) |
| get autopilot mode as set by RADIO_MODE 3-way switch | |
| void | set_rotorcraft_commands (pprz_t *cmd_out, int32_t *cmd_in, bool in_flight, bool motors_on) |
| Display descent speed in failsafe mode if needed. | |
Utility functions and includes for autopilots.
Definition in file autopilot_utils.h.
| #define SetRotorcraftCommands | ( | _cmd, | |
| _in_flight, | |||
| _motors_on | |||
| ) | set_rotorcraft_commands(commands, _cmd, _in_flight, _motors_on) |
Definition at line 39 of file autopilot_utils.h.
get autopilot mode as set by RADIO_MODE 3-way switch
Definition at line 41 of file autopilot_utils.c.
|
extern |
Display descent speed in failsafe mode if needed.
Set Rotorcraft commands.
Set Rotorcraft commands. Limit thrust and/or yaw depending of the in_flight and motors_on flag status
Display descent speed in failsafe mode if needed.
Limit thrust and/or yaw depending of the in_flight and motors_on flag status
A default implementation is provided, but the function can be redefined
| [out] | cmd_out | output command vector in pprz_t (usually commands array) |
| [in/out] | cmd_in input commands to apply, might be affected by in_flight and motors_on param (FIXME really ?) | |
| [in] | in_flight | tells if rotorcraft is in flight |
| [in] | motors_on | tells if motors are running |
Set Rotorcraft commands.
Set Rotorcraft commands. Limit thrust and/or yaw depending of the in_flight and motors_on flag status
Definition at line 123 of file autopilot_utils.c.
References foo, lock_wings, and WING_POS_NOMINAL_THRUST.