|
Paparazzi UAS
v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
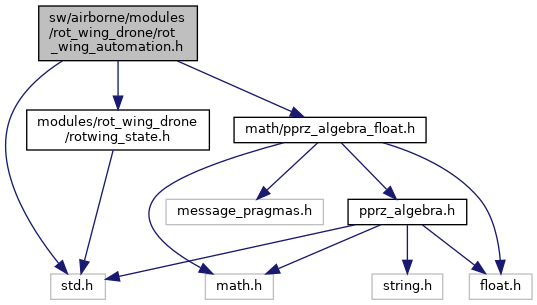
#include "std.h"#include "math/pprz_algebra_float.h"#include "modules/rot_wing_drone/rotwing_state.h" Include dependency graph for rot_wing_automation.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for rot_wing_automation.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | rot_wing_automation |
Macros | |
| #define | RotWingAutomationReadyForForward() (rot_wing_a.transitioned && (rotwing_state_skewing.wing_angle_deg > 75.0)) |
Functions | |
| void | init_rot_wing_automation (void) |
| void | periodic_rot_wing_automation (void) |
| void | rot_wing_vis_transition (uint8_t wp_transition_id, uint8_t wp_decel_id, uint8_t wp_end_id) |
Variables | |
| struct rot_wing_automation | rot_wing_a |
Definition in file rot_wing_automation.h.
| struct rot_wing_automation |
Definition at line 37 of file rot_wing_automation.h.
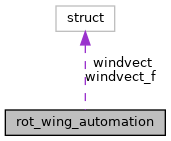
Collaboration diagram for rot_wing_automation:| Data Fields | ||
|---|---|---|
| float | trans_accel | |
| float | trans_airspeed | |
| float | trans_decel | |
| float | trans_length | |
| bool | transitioned | |
| struct FloatVect2 | windvect | |
| struct FloatVect2 | windvect_f | |
| #define RotWingAutomationReadyForForward | ( | ) | (rot_wing_a.transitioned && (rotwing_state_skewing.wing_angle_deg > 75.0)) |
Definition at line 52 of file rot_wing_automation.h.
| void init_rot_wing_automation | ( | void | ) |
Definition at line 70 of file rot_wing_automation.c.
References init_butterworth_2_low_pass(), rot_wing_a, ROT_WING_AUTOMATION_TRANS_ACCEL, ROT_WING_AUTOMATION_TRANS_AIRSPEED, ROT_WING_AUTOMATION_TRANS_DECEL, ROT_WING_AUTOMATION_TRANS_LENGTH, ROT_WING_AUTOMATION_WIND_FILT_CUTOFF, rot_wing_automation_wind_filter, rot_wing_automation::trans_accel, rot_wing_automation::trans_airspeed, rot_wing_automation::trans_decel, rot_wing_automation::trans_length, rot_wing_automation::transitioned, rot_wing_automation::windvect, rot_wing_automation::windvect_f, FloatVect2::x, and FloatVect2::y.
Here is the call graph for this function:| void periodic_rot_wing_automation | ( | void | ) |
Definition at line 91 of file rot_wing_automation.c.
References rot_wing_a, stateGetAirspeed_f(), rot_wing_automation::trans_airspeed, rot_wing_automation::transitioned, and update_wind_vector().
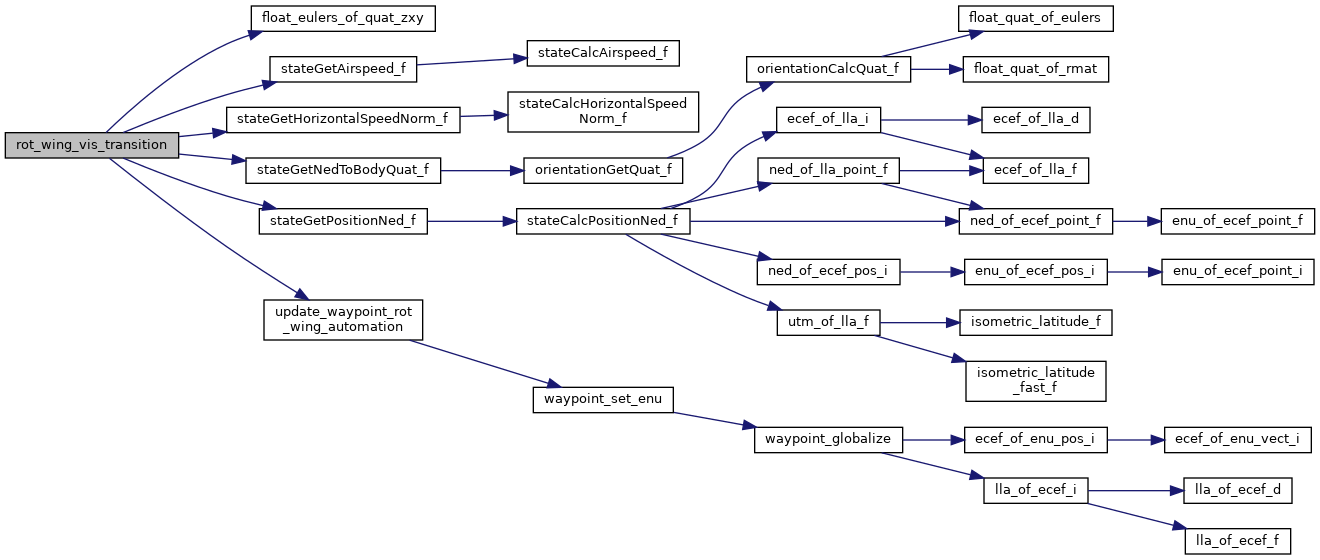
Here is the call graph for this function:Definition at line 139 of file rot_wing_automation.c.
References eulers_zxy, float_eulers_of_quat_zxy(), ground_speed, FloatEulers::psi, rot_wing_a, stateGetAirspeed_f(), stateGetHorizontalSpeedNorm_f(), stateGetNedToBodyQuat_f(), stateGetPositionNed_f(), rot_wing_automation::trans_accel, rot_wing_automation::trans_airspeed, rot_wing_automation::trans_decel, rot_wing_automation::trans_length, update_waypoint_rot_wing_automation(), VECT3_COPY, VECT3_SUM, FloatVect3::x, FloatVect3::y, FloatVect3::z, and NedCoor_f::z.
Here is the call graph for this function:
|
extern |
Definition at line 1 of file rot_wing_automation.c.
Referenced by init_rot_wing_automation(), periodic_rot_wing_automation(), rot_wing_vis_transition(), and update_wind_vector().