|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
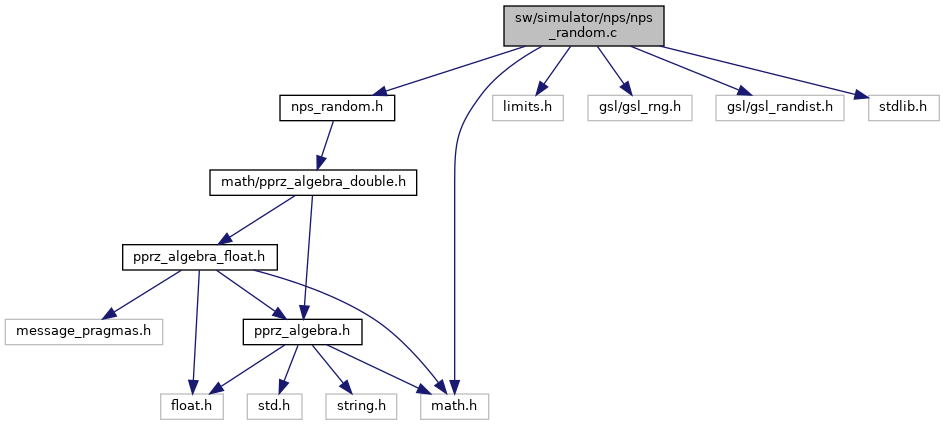
#include "nps_random.h"#include <math.h>#include <limits.h>#include <gsl/gsl_rng.h>#include <gsl/gsl_randist.h>#include <stdlib.h> Include dependency graph for nps_random.c:
Include dependency graph for nps_random.c:Go to the source code of this file.
Functions | |
| void | double_vect3_add_gaussian_noise (struct DoubleVect3 *vect, struct DoubleVect3 *std_dev) |
| void | float_vect3_add_gaussian_noise (struct FloatVect3 *vect, struct FloatVect3 *std_dev) |
| void | float_rates_add_gaussian_noise (struct FloatRates *vect, struct FloatRates *std_dev) |
| void | double_vect3_get_gaussian_noise (struct DoubleVect3 *vect, struct DoubleVect3 *std_dev) |
| void | double_vect3_update_random_walk (struct DoubleVect3 *rw, struct DoubleVect3 *std_dev, double dt, double thau) |
| double | get_gaussian_noise (void) |
| void double_vect3_add_gaussian_noise | ( | struct DoubleVect3 * | vect, |
| struct DoubleVect3 * | std_dev | ||
| ) |
Definition at line 34 of file nps_random.c.
References foo, get_gaussian_noise(), DoubleVect3::x, DoubleVect3::y, and DoubleVect3::z.
Referenced by nps_sensor_accel_run_step(), nps_sensor_gps_run_step(), and nps_sensor_gyro_run_step().
Here is the call graph for this function: Here is the caller graph for this function:| void double_vect3_get_gaussian_noise | ( | struct DoubleVect3 * | vect, |
| struct DoubleVect3 * | std_dev | ||
| ) |
Definition at line 57 of file nps_random.c.
References foo, get_gaussian_noise(), DoubleVect3::x, DoubleVect3::y, and DoubleVect3::z.
Referenced by double_vect3_update_random_walk().
Here is the call graph for this function: Here is the caller graph for this function:| void double_vect3_update_random_walk | ( | struct DoubleVect3 * | rw, |
| struct DoubleVect3 * | std_dev, | ||
| double | dt, | ||
| double | thau | ||
| ) |
Definition at line 65 of file nps_random.c.
References double_vect3_get_gaussian_noise(), foo, VECT3_ADD, and VECT3_SMUL.
Referenced by nps_sensor_gps_run_step(), and nps_sensor_gyro_run_step().
Here is the call graph for this function: Here is the caller graph for this function:| void float_rates_add_gaussian_noise | ( | struct FloatRates * | vect, |
| struct FloatRates * | std_dev | ||
| ) |
Definition at line 48 of file nps_random.c.
References foo, get_gaussian_noise(), FloatRates::p, FloatRates::q, and FloatRates::r.
Here is the call graph for this function:| void float_vect3_add_gaussian_noise | ( | struct FloatVect3 * | vect, |
| struct FloatVect3 * | std_dev | ||
| ) |
Definition at line 41 of file nps_random.c.
References foo, get_gaussian_noise(), FloatVect3::x, FloatVect3::y, and FloatVect3::z.
Here is the call graph for this function:Definition at line 109 of file nps_random.c.
References foo.
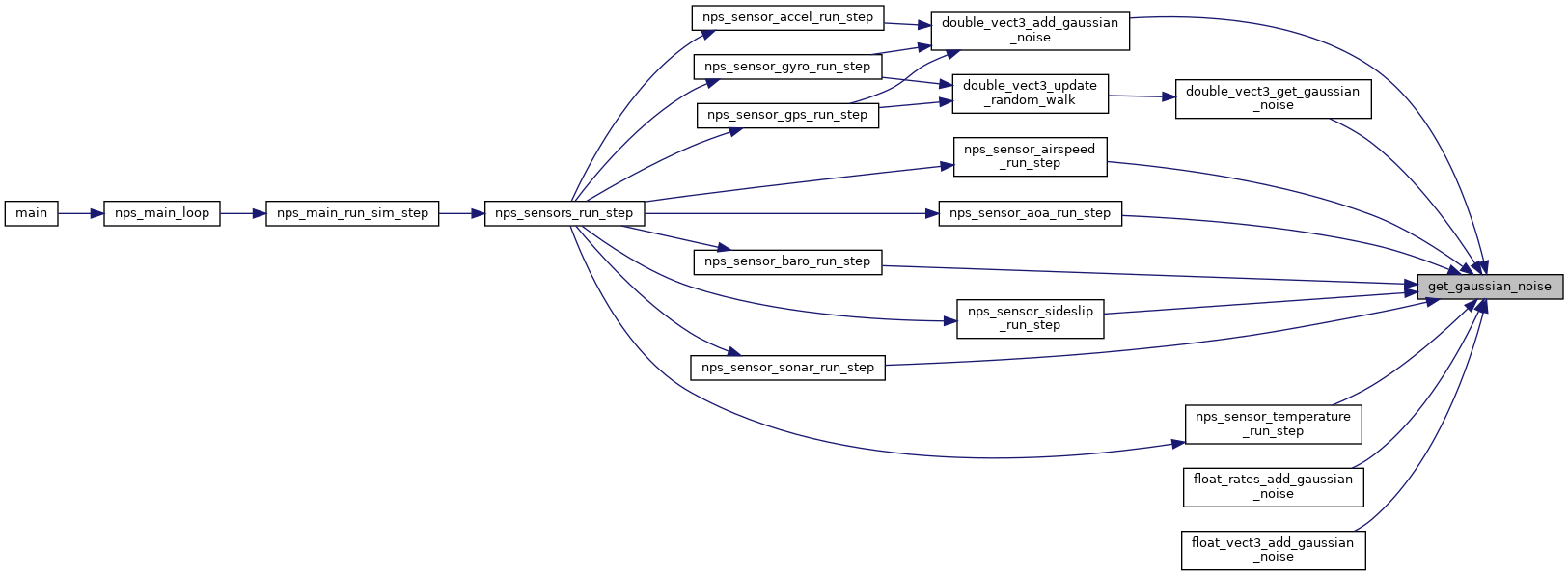
Referenced by double_vect3_add_gaussian_noise(), double_vect3_get_gaussian_noise(), float_rates_add_gaussian_noise(), float_vect3_add_gaussian_noise(), nps_sensor_airspeed_run_step(), nps_sensor_aoa_run_step(), nps_sensor_baro_run_step(), nps_sensor_sideslip_run_step(), nps_sensor_sonar_run_step(), and nps_sensor_temperature_run_step().
Here is the caller graph for this function: