|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Basic MAVLink datalink implementation. More...
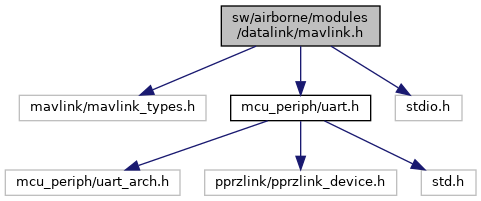
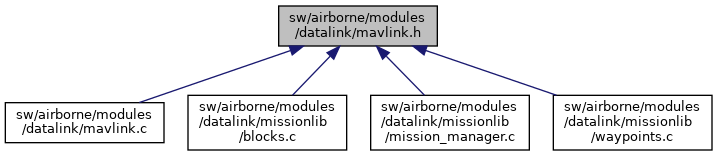
 Include dependency graph for mavlink.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for mavlink.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | MAVLINK_USE_CONVENIENCE_FUNCTIONS |
| #define | MAVLINK_ALIGNED_FIELDS 0 |
| #define | MAVLINK_DEBUG(...) {} |
| #define | MAVLINK_DEV uart1 |
| #define | MAVLinkDev (&(MAVLINK_DEV).device) |
| #define | MAVLinkTransmit(c) MAVLinkDev->put_byte(MAVLinkDev->periph, 0, c) |
| #define | MAVLinkChAvailable() MAVLinkDev->char_available(MAVLinkDev->periph) |
| #define | MAVLinkGetch() MAVLinkDev->get_byte(MAVLinkDev->periph) |
| #define | MAVLinkSendMessage() MAVLinkDev->send_message(MAVLinkDev->periph, 0) |
Functions | |
| void | mavlink_init (void) |
| Module functions. | |
| void | mavlink_periodic (void) |
| Periodic MAVLink calls. | |
| void | mavlink_periodic_telemetry (void) |
| Send periodic mavlink messages as defined in Mavlink process of telemetry xml file. | |
| void | mavlink_event (void) |
| Event MAVLink calls. | |
| static void | comm_send_ch (mavlink_channel_t chan, uint8_t ch) |
| Send one char (uint8_t) over a comm channel. | |
Variables | |
| mavlink_system_t | mavlink_system |
Basic MAVLink datalink implementation.
Definition in file mavlink.h.
| #define MAVLinkChAvailable | ( | ) | MAVLinkDev->char_available(MAVLinkDev->periph) |
| #define MAVLinkDev (&(MAVLINK_DEV).device) |
| #define MAVLinkGetch | ( | ) | MAVLinkDev->get_byte(MAVLinkDev->periph) |
| #define MAVLinkSendMessage | ( | ) | MAVLinkDev->send_message(MAVLinkDev->periph, 0) |
| #define MAVLinkTransmit | ( | c | ) | MAVLinkDev->put_byte(MAVLinkDev->periph, 0, c) |
|
inlinestatic |
Send one char (uint8_t) over a comm channel.
| chan | MAVLink channel to use, usually MAVLINK_COMM_0 = UART0 |
| ch | Character to send |
Definition at line 83 of file mavlink.h.
References foo, and MAVLinkTransmit.
Event MAVLink calls.
Definition at line 215 of file mavlink.c.
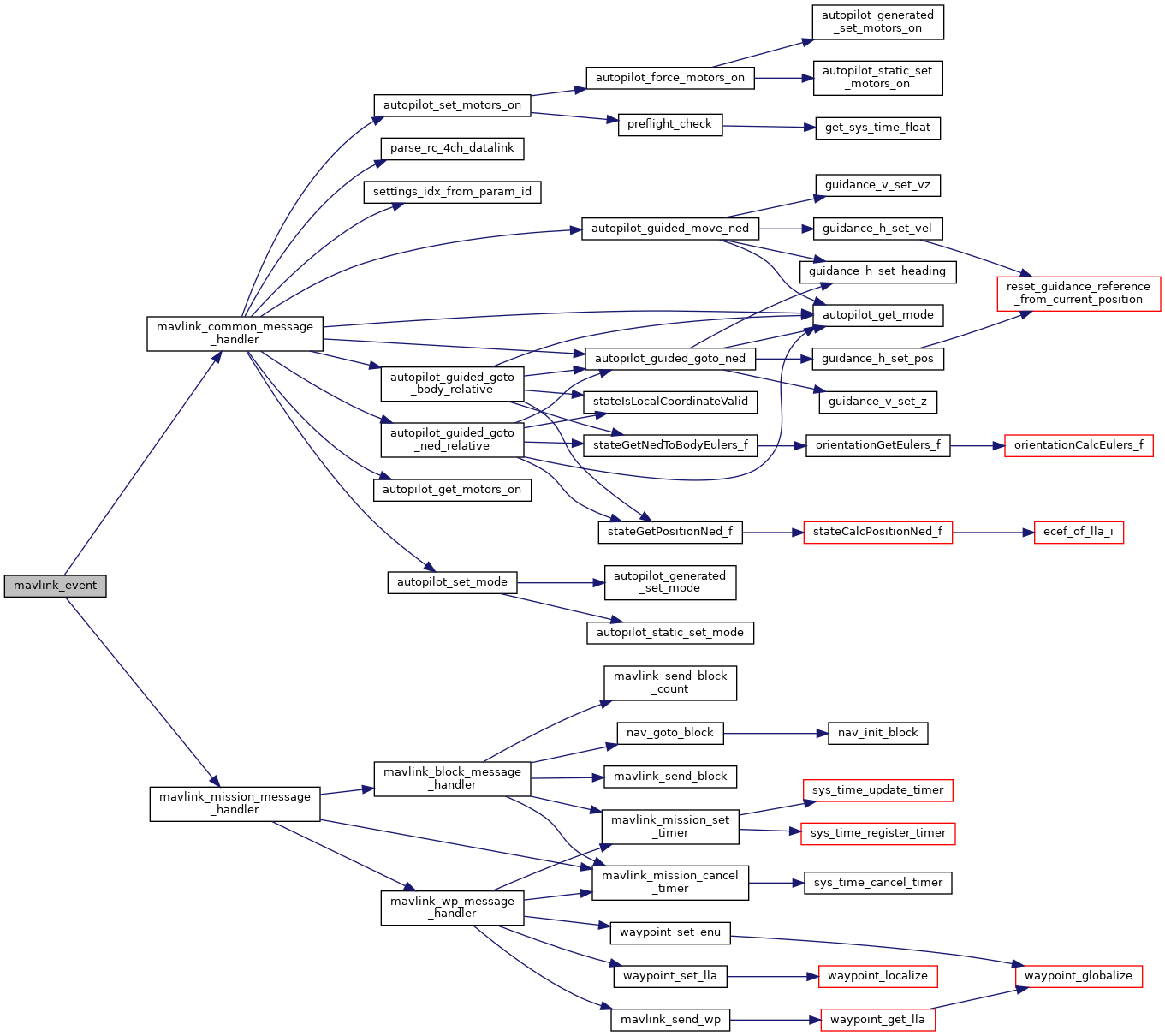
References foo, mavlink_common_message_handler(), mavlink_mission_message_handler(), MAVLinkChAvailable, MAVLinkGetch, msg, and status.
Here is the call graph for this function:Module functions.
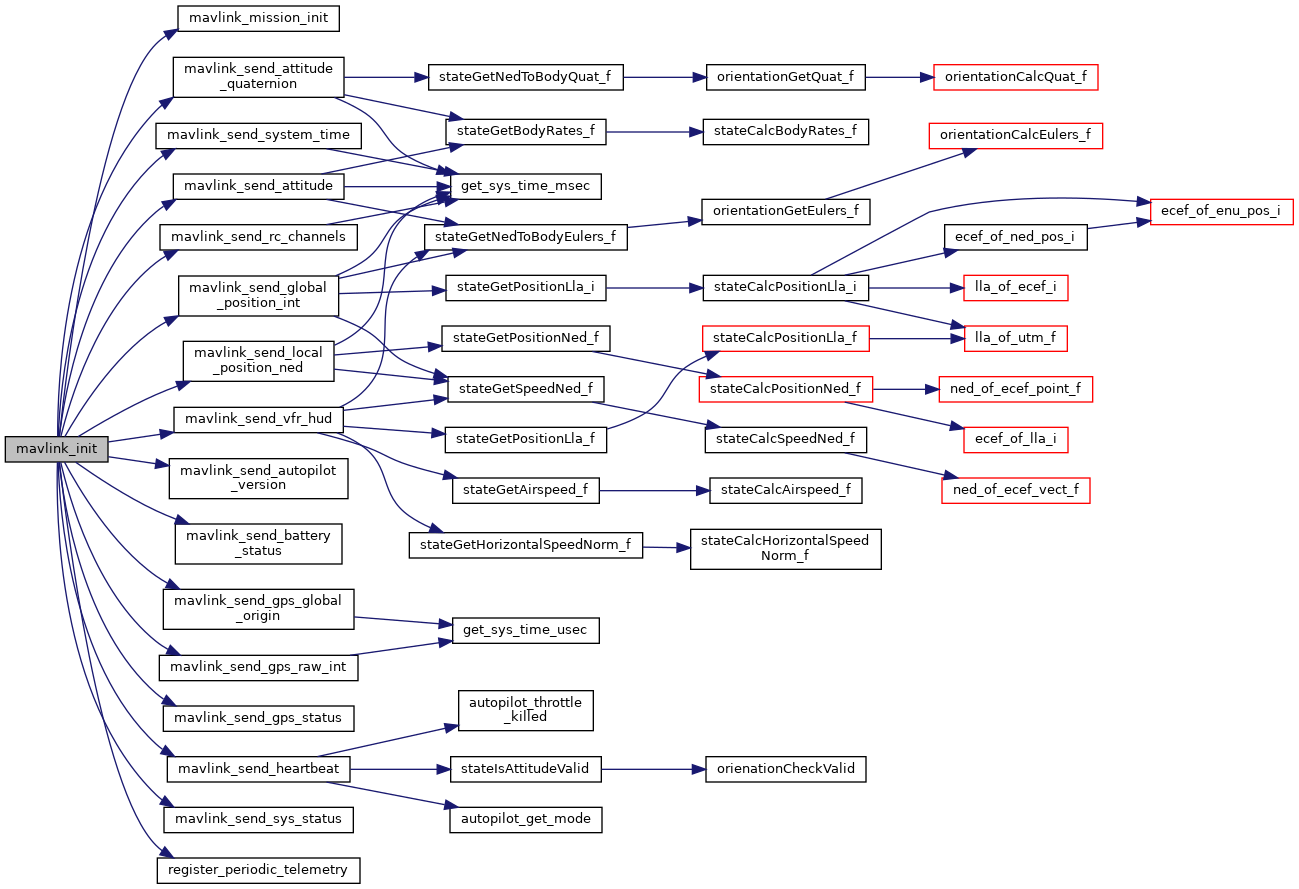
Definition at line 116 of file mavlink.c.
References custom_version, foo, mavlink_mission_init(), mavlink_send_attitude(), mavlink_send_attitude_quaternion(), mavlink_send_autopilot_version(), mavlink_send_battery_status(), mavlink_send_extended_sys_state(), mavlink_send_global_position_int(), mavlink_send_gps_global_origin(), mavlink_send_gps_raw_int(), mavlink_send_gps_status(), mavlink_send_heartbeat(), mavlink_send_local_position_ned(), mavlink_send_rc_channels(), mavlink_send_sys_status(), mavlink_send_system_time(), mavlink_send_vfr_hud(), MAVLINK_SYSID, mavlink_system, mission_mgr, and register_periodic_telemetry().
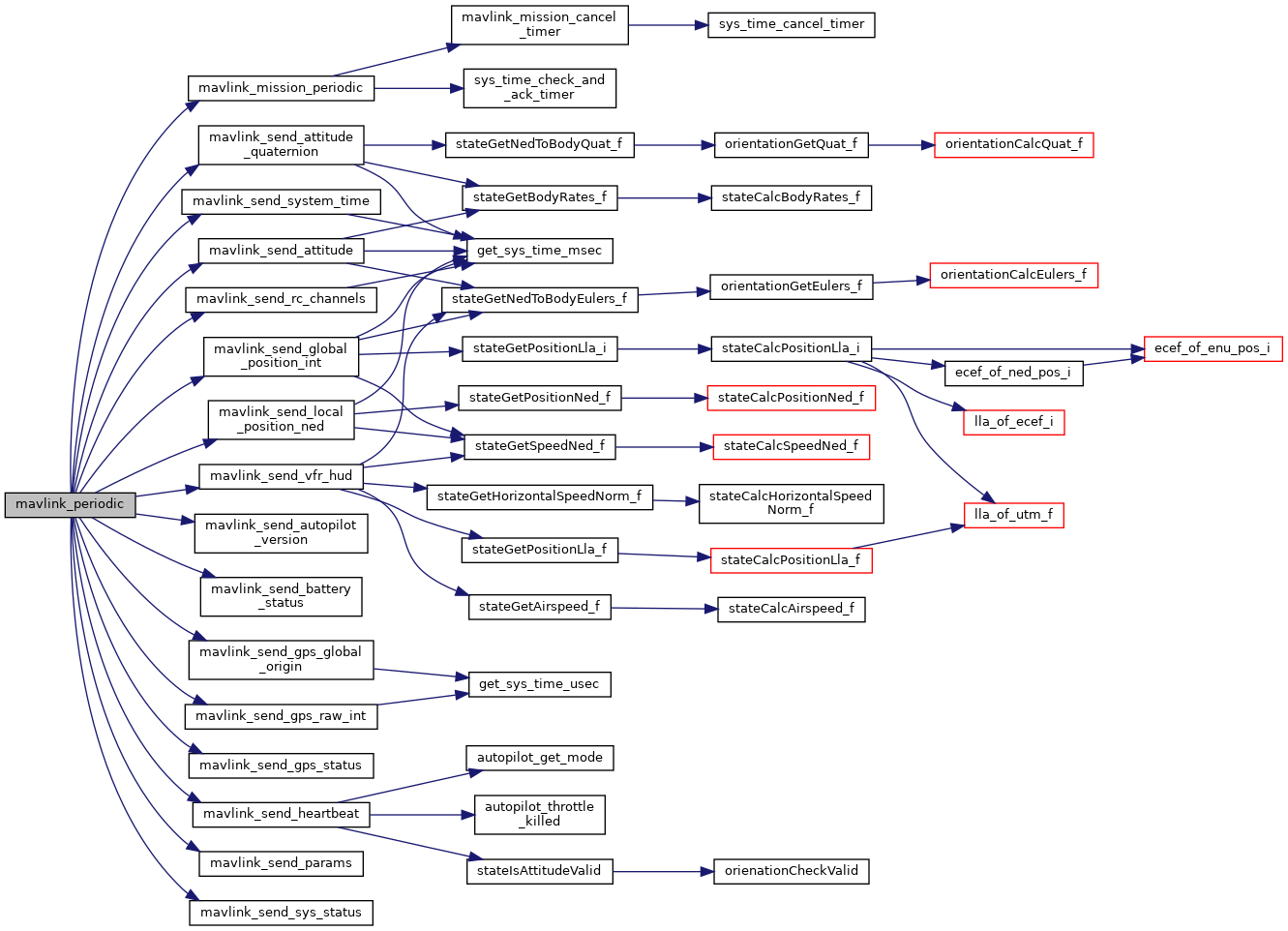
Here is the call graph for this function:Periodic MAVLink calls.
Called at MAVLINK_PERIODIC_FREQ (set in module xml to 10Hz)
Definition at line 161 of file mavlink.c.
References foo, mavlink_mission_periodic(), mavlink_send_attitude(), mavlink_send_attitude_quaternion(), mavlink_send_autopilot_version(), mavlink_send_battery_status(), mavlink_send_global_position_int(), mavlink_send_gps_global_origin(), mavlink_send_gps_raw_int(), mavlink_send_gps_status(), mavlink_send_heartbeat(), mavlink_send_local_position_ned(), mavlink_send_params(), mavlink_send_rc_channels(), mavlink_send_sys_status(), mavlink_send_system_time(), and mavlink_send_vfr_hud().
Here is the call graph for this function:
|
extern |