|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
module used to send GPS data over a Tawaki UART for extern instrument using NMEA protocol Exemple of use : MAPIR camera stores GPS data in metadata on each frame More...
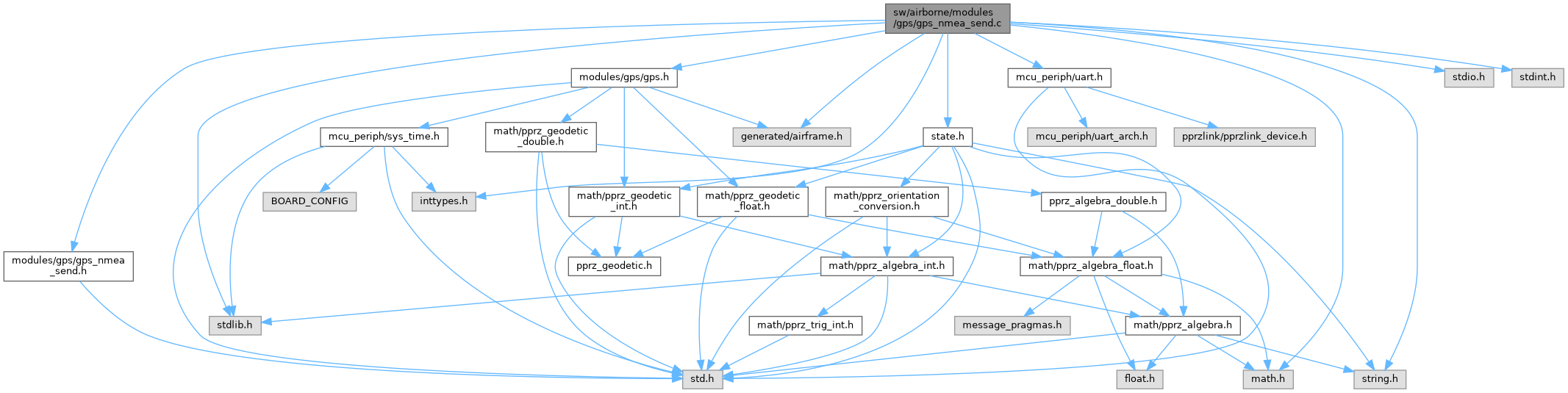
#include "modules/gps/gps_nmea_send.h"#include "mcu_periph/uart.h"#include "generated/airframe.h"#include "state.h"#include "modules/gps/gps.h"#include <string.h>#include <stdio.h>#include <stdint.h>#include <stdlib.h>#include <math.h>#include <inttypes.h> Include dependency graph for gps_nmea_send.c:
Include dependency graph for gps_nmea_send.c:Go to the source code of this file.
Functions | |
| static void | recover_gps_data (void) |
| Function to recover data available onboard from GPS. | |
| static void | build_nmea_sentence (void) |
| Function to build sentence for NMEA Protocol. | |
| static uint8_t | nmea_checksum (const char *sentence, int length) |
| Function to calculate checksum. | |
| static void | nmea_convert_deg_to_DDMM (double deg, char *buf, int is_lat) |
| Function to convert lat long in DDLL.MMMM Format Lat and long don't have the same length. | |
| static void | gps_nmea_get_system_date_str (char *buf_date, size_t buf_date_size, char *buf_time, size_t buf_time_size) |
| Get Date from system. | |
| static void | nmea_send (const char *payload, int payload_length) |
| Function to send payload to UART. | |
| void | gps_nmea_send_init (void) |
| Initialization function. | |
| void | gps_nmea_send_periodic (void) |
| Periodic function to send data. | |
Variables | |
| struct Gps_Nmea_Send | gps_nmea_send |
module used to send GPS data over a Tawaki UART for extern instrument using NMEA protocol Exemple of use : MAPIR camera stores GPS data in metadata on each frame
Definition in file gps_nmea_send.c.
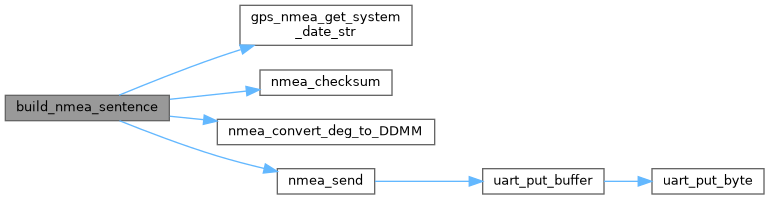
Function to build sentence for NMEA Protocol.
Definition at line 105 of file gps_nmea_send.c.
References gps_nmea_send_msg_t::course, GpsState::fix, foo, gps, GPS_FIX_3D, gps_nmea_get_system_date_str(), gps_nmea_send, gps_nmea_send_msg_t::hmsl, gps_nmea_send_msg_t::lat, gps_nmea_send_msg_t::lon, Gps_Nmea_Send::msg, nmea_checksum(), nmea_convert_deg_to_DDMM(), nmea_send(), gps_nmea_send_msg_t::num_sv, gps_nmea_send_msg_t::pdop, and gps_nmea_send_msg_t::vground.
Referenced by gps_nmea_send_periodic().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Get Date from system.
Definition at line 221 of file gps_nmea_send.c.
References foo, gps, GpsState::tow, and GpsState::week.
Referenced by build_nmea_sentence().
Here is the caller graph for this function:Initialization function.
Definition at line 56 of file gps_nmea_send.c.
References gps_nmea_send_msg_t::course, Gps_Nmea_Send::error_init, gps_nmea_send, gps_nmea_send_msg_t::hmsl, gps_nmea_send_msg_t::lat, gps_nmea_send_msg_t::lon, Gps_Nmea_Send::msg, gps_nmea_send_msg_t::num_sv, gps_nmea_send_msg_t::pdop, and gps_nmea_send_msg_t::vground.
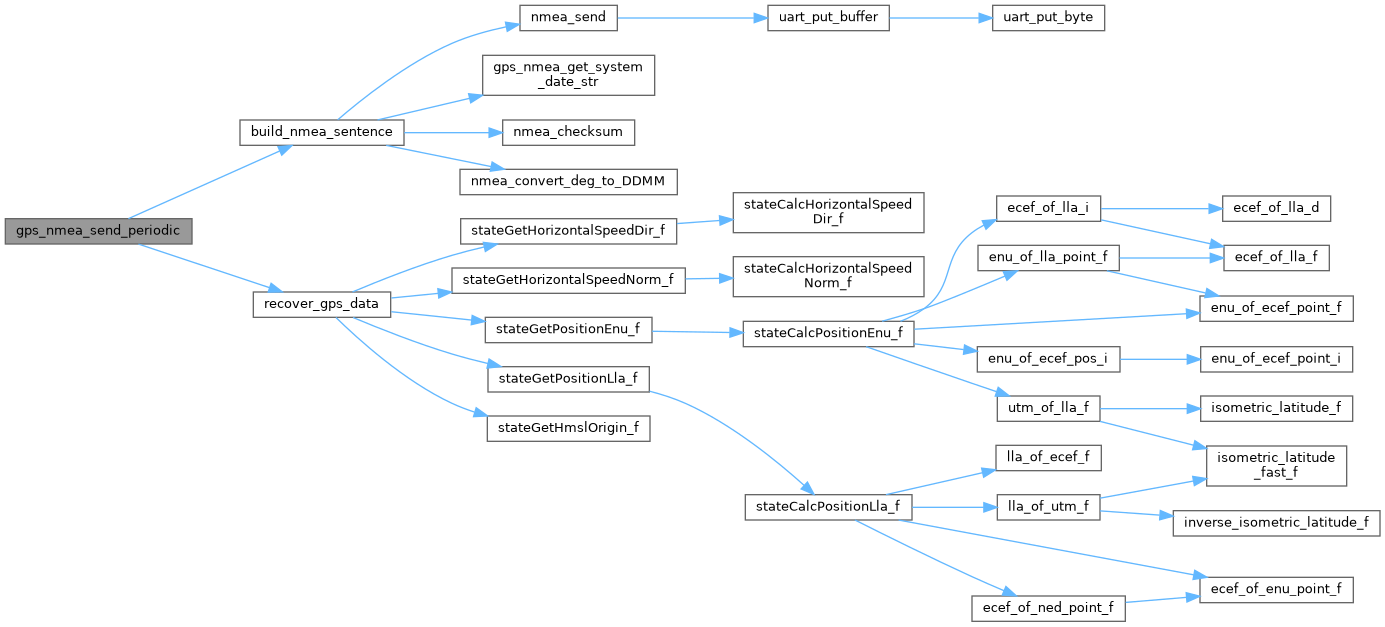
Periodic function to send data.
Definition at line 72 of file gps_nmea_send.c.
References build_nmea_sentence(), and recover_gps_data().
Here is the call graph for this function:Function to calculate checksum.
Definition at line 190 of file gps_nmea_send.c.
References foo.
Referenced by build_nmea_sentence().
Here is the caller graph for this function:Function to convert lat long in DDLL.MMMM Format Lat and long don't have the same length.
Definition at line 203 of file gps_nmea_send.c.
References foo.
Referenced by build_nmea_sentence().
Here is the caller graph for this function:Function to send payload to UART.
Definition at line 273 of file gps_nmea_send.c.
References foo, and uart_put_buffer().
Referenced by build_nmea_sentence().
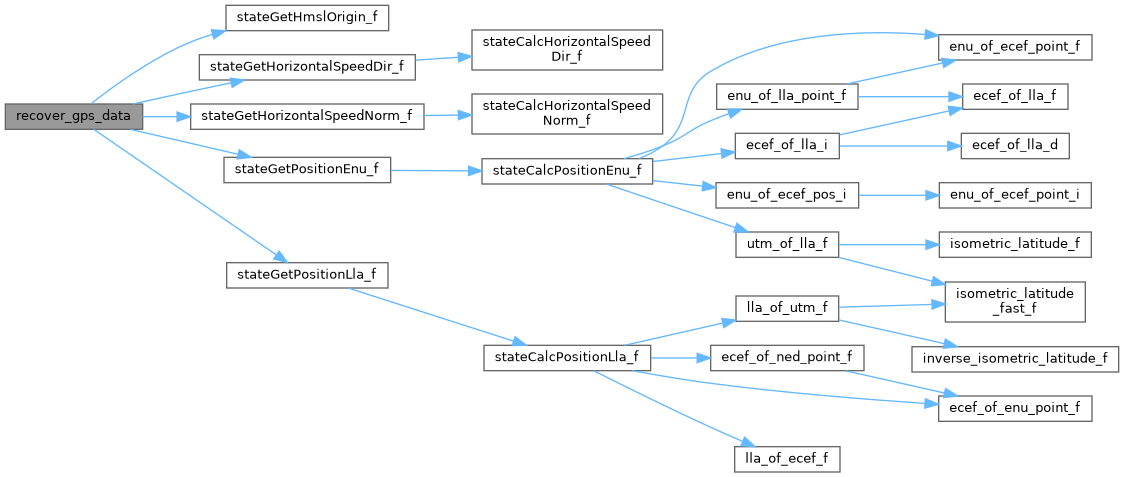
Here is the call graph for this function: Here is the caller graph for this function:Function to recover data available onboard from GPS.
Definition at line 82 of file gps_nmea_send.c.
References GpsState::course, gps_nmea_send_msg_t::course, foo, gps, gps_nmea_send, GpsState::gspeed, GpsState::hmsl, gps_nmea_send_msg_t::hmsl, LlaCoor_i::lat, gps_nmea_send_msg_t::lat, GpsState::lla_pos, LlaCoor_i::lon, gps_nmea_send_msg_t::lon, Gps_Nmea_Send::msg, NormCourseRad, GpsState::num_sv, gps_nmea_send_msg_t::num_sv, GpsState::pdop, gps_nmea_send_msg_t::pdop, stateGetHmslOrigin_f(), stateGetHorizontalSpeedDir_f(), stateGetHorizontalSpeedNorm_f(), stateGetPositionEnu_f(), stateGetPositionLla_f(), gps_nmea_send_msg_t::vground, and EnuCoor_f::z.
Referenced by gps_nmea_send_periodic().
Here is the call graph for this function: Here is the caller graph for this function:| struct Gps_Nmea_Send gps_nmea_send |
Definition at line 43 of file gps_nmea_send.c.
Referenced by build_nmea_sentence(), gps_nmea_send_init(), and recover_gps_data().