|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
ARDrone2 specific board initialization function. More...
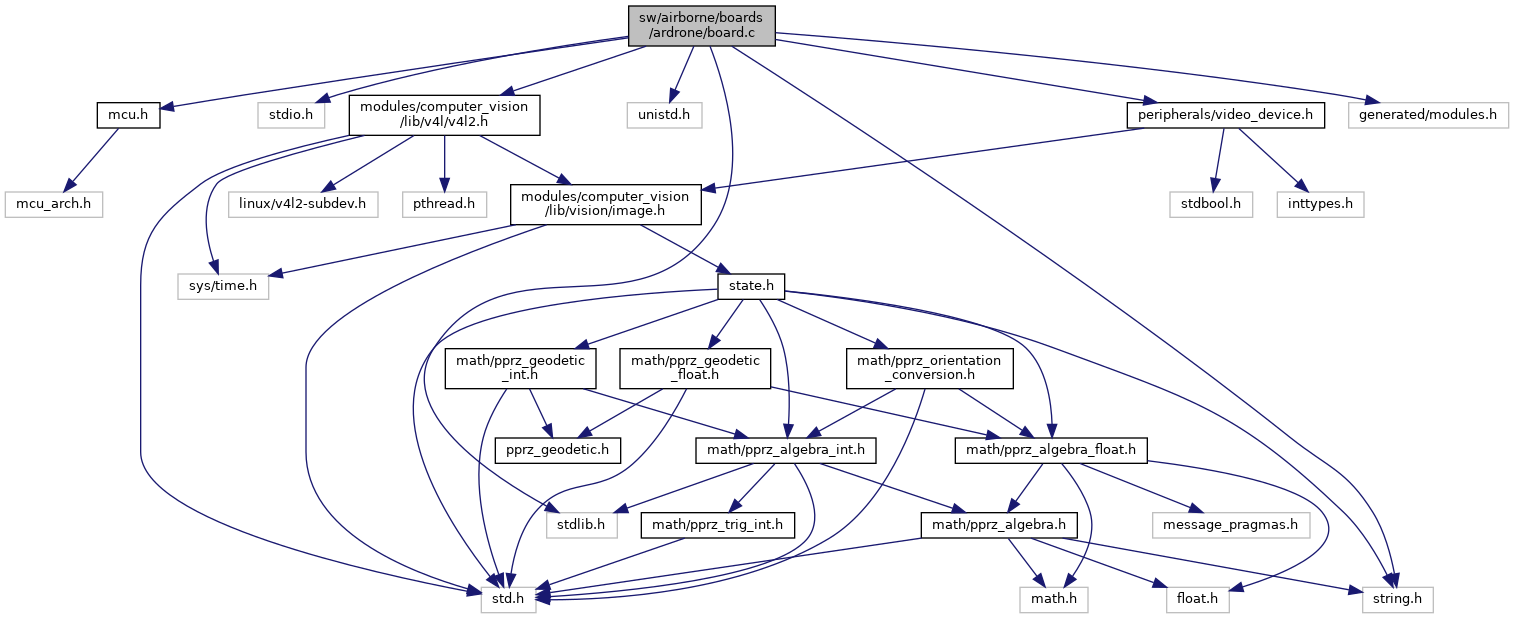
#include <stdlib.h>#include <stdio.h>#include <string.h>#include <unistd.h>#include "mcu.h"#include "modules/computer_vision/lib/v4l/v4l2.h"#include "peripherals/video_device.h"#include "generated/modules.h" Include dependency graph for board.c:
Include dependency graph for board.c:Go to the source code of this file.
Functions | |
| int | KillGracefully (char *process_name) |
| void | board_init (void) |
| Optional board init function called at the start of mcu_init(). | |
Variables | |
| struct video_config_t | front_camera |
| struct video_config_t | bottom_camera |
ARDrone2 specific board initialization function.
Definition in file board.c.
Definition at line 94 of file board.c.
References foo.
Referenced by board_init().
Here is the caller graph for this function:| struct video_config_t bottom_camera |
| struct video_config_t front_camera |