|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
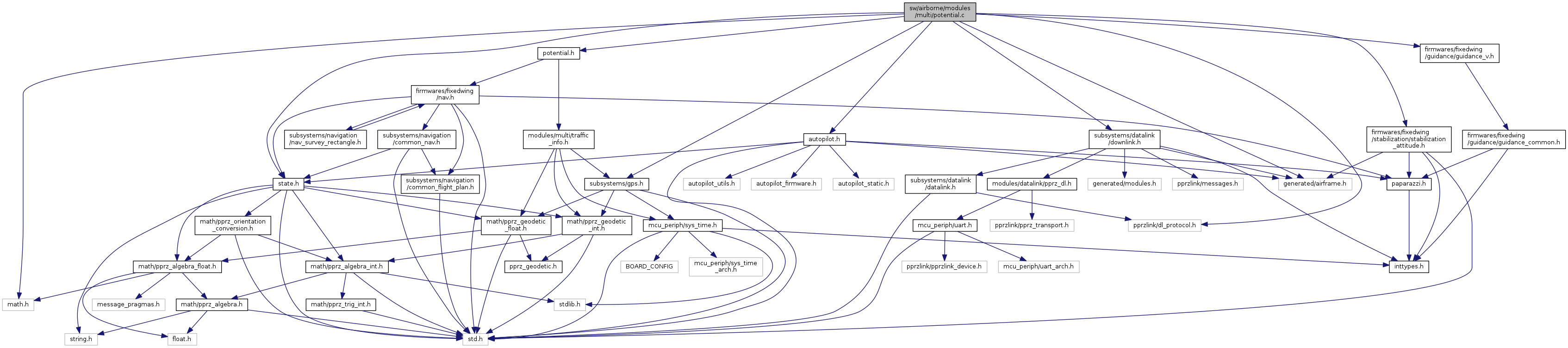
#include <math.h>#include "subsystems/datalink/downlink.h"#include "pprzlink/dl_protocol.h"#include "potential.h"#include "state.h"#include "firmwares/fixedwing/stabilization/stabilization_attitude.h"#include "firmwares/fixedwing/guidance/guidance_v.h"#include "autopilot.h"#include "subsystems/gps.h"#include "generated/airframe.h" Include dependency graph for potential.c:
Include dependency graph for potential.c:Go to the source code of this file.
Macros | |
| #define | POTENTIAL_C |
| #define | FORCE_POS_GAIN 1. |
| #define | FORCE_SPEED_GAIN 1. |
| #define | FORCE_CLIMB_GAIN 1. |
| #define | FORCE_MAX_DIST 100. |
Functions | |
| void | potential_init (void) |
| int | potential_task (void) |
Variables | |
| struct force_ | potential_force |
| float | force_pos_gain |
| float | force_speed_gain |
| float | force_climb_gain |
| #define FORCE_CLIMB_GAIN 1. |
Definition at line 36 of file potential.c.
Referenced by potential_init().
| #define FORCE_MAX_DIST 100. |
Definition at line 40 of file potential.c.
Referenced by potential_task().
| #define FORCE_POS_GAIN 1. |
Definition at line 28 of file potential.c.
Referenced by potential_init().
| #define FORCE_SPEED_GAIN 1. |
Definition at line 32 of file potential.c.
Referenced by potential_init().
| #define POTENTIAL_C |
Definition at line 4 of file potential.c.
| void potential_init | ( | void | ) |
Definition at line 43 of file potential.c.
References force_::alt, force_::climb, force_::east, force_climb_gain, FORCE_CLIMB_GAIN, force_pos_gain, FORCE_POS_GAIN, force_speed_gain, FORCE_SPEED_GAIN, force_::north, potential_force, and force_::speed.
| int potential_task | ( | void | ) |
Definition at line 58 of file potential.c.
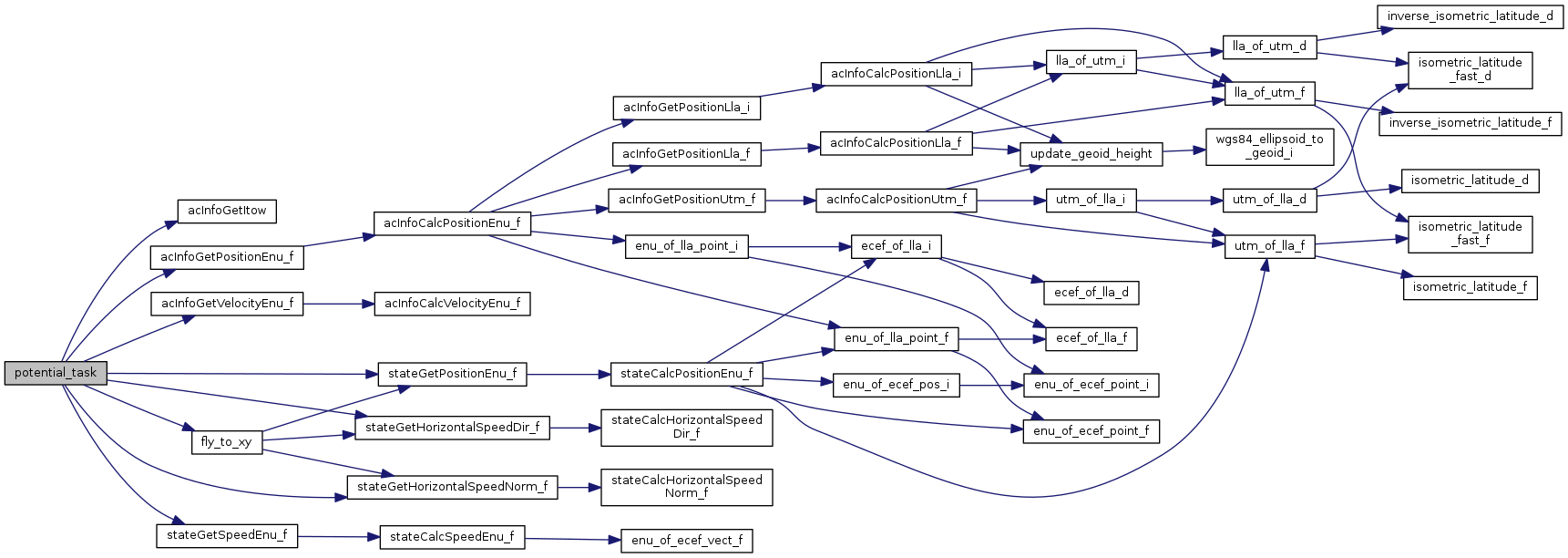
References ac_id, acInfoGetItow(), acInfoGetPositionEnu_f(), acInfoGetVelocityEnu_f(), force_::alt, CARROT, force_::climb, DefaultChannel, DefaultDevice, desired_x, desired_y, dn, force_::east, fly_to_xy(), force_climb_gain, FORCE_MAX_DIST, force_pos_gain, force_speed_gain, gps, Max, NavVerticalAutoThrottleMode, NavVerticalClimbMode, NB_ACS, force_::north, potential_force, force_::speed, stateGetHorizontalSpeedDir_f(), stateGetHorizontalSpeedNorm_f(), stateGetPositionEnu_f(), stateGetSpeedEnu_f(), ti_acs, GpsState::tow, V_CTL_ALTITUDE_MAX_CLIMB, v_ctl_auto_throttle_cruise_throttle, EnuCoor_f::x, EnuCoor_f::y, and EnuCoor_f::z.
Here is the call graph for this function:| float force_climb_gain |
Definition at line 25 of file potential.c.
Referenced by potential_init(), and potential_task().
| float force_pos_gain |
Definition at line 23 of file potential.c.
Referenced by potential_init(), and potential_task().
| float force_speed_gain |
Definition at line 24 of file potential.c.
Referenced by potential_init(), and potential_task().
| struct force_ potential_force |
Definition at line 21 of file potential.c.
Referenced by potential_init(), and potential_task().
 1.8.8
1.8.8