|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
#include "nps_autopilot.h"#include "firmwares/rotorcraft/main.h"#include "nps_sensors.h"#include "nps_radio_control.h"#include "nps_electrical.h"#include "nps_fdm.h"#include "subsystems/radio_control.h"#include "subsystems/imu.h"#include "mcu_periph/sys_time.h"#include "state.h"#include "subsystems/ahrs.h"#include "subsystems/ins.h"#include "math/pprz_algebra.h"#include "subsystems/actuators/motor_mixing.h"#include "subsystems/abi.h"#include "pprzlink/messages.h"#include "subsystems/datalink/downlink.h"#include "subsystems/datalink/datalink.h"#include "subsystems/actuators.h"#include <stdio.h>#include "subsystems/gps.h" Include dependency graph for nps_autopilot_rotorcraft.c:
Include dependency graph for nps_autopilot_rotorcraft.c:Go to the source code of this file.
Macros | |
| #define | NPS_BYPASS_AHRS FALSE |
| #define | NPS_BYPASS_INS FALSE |
Functions | |
| void | nps_autopilot_init (enum NpsRadioControlType type_rc, int num_rc_script, char *rc_dev) |
| void | nps_autopilot_run_systime_step (void) |
| void | nps_autopilot_run_step (double time) |
| void | sim_overwrite_ahrs (void) |
| void | sim_overwrite_ins (void) |
Variables | |
| struct NpsAutopilot | nps_autopilot |
| bool | nps_bypass_ahrs |
| bool | nps_bypass_ins |
| #define NPS_BYPASS_AHRS FALSE |
Definition at line 60 of file nps_autopilot_rotorcraft.c.
Referenced by nps_autopilot_init().
| #define NPS_BYPASS_INS FALSE |
Definition at line 64 of file nps_autopilot_rotorcraft.c.
Referenced by nps_autopilot_init().
| void nps_autopilot_init | ( | enum NpsRadioControlType | type_rc, |
| int | num_rc_script, | ||
| char * | rc_dev | ||
| ) |
Definition at line 71 of file nps_autopilot_rotorcraft.c.
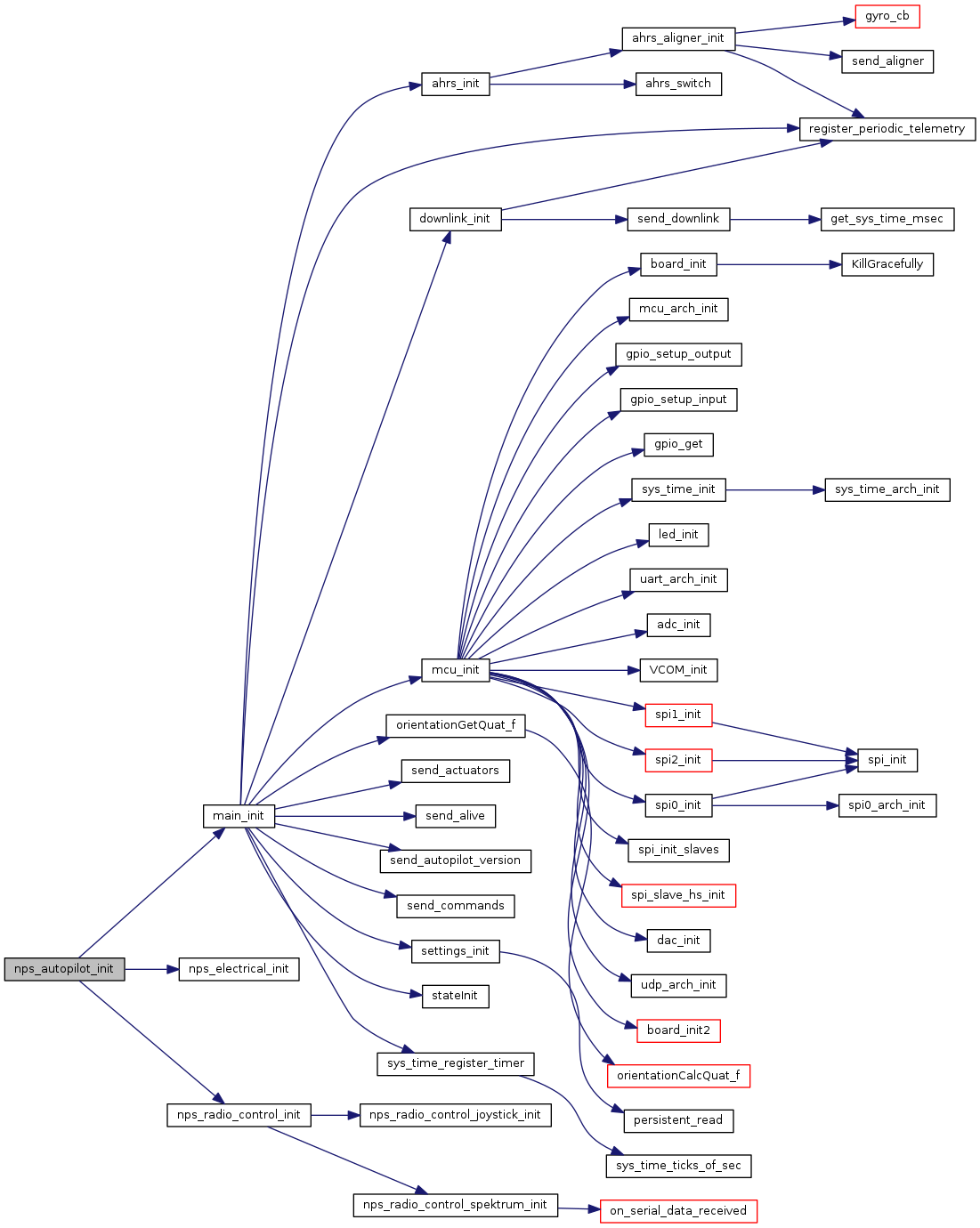
References NpsAutopilot::launch, main_init(), nps_autopilot, nps_bypass_ahrs, NPS_BYPASS_AHRS, nps_bypass_ins, NPS_BYPASS_INS, nps_electrical_init(), nps_radio_control_init(), and TRUE.
Referenced by nps_radio_and_autopilot_init().
Here is the call graph for this function: Here is the caller graph for this function:| void nps_autopilot_run_step | ( | double | time | ) |
Definition at line 93 of file nps_autopilot_rotorcraft.c.
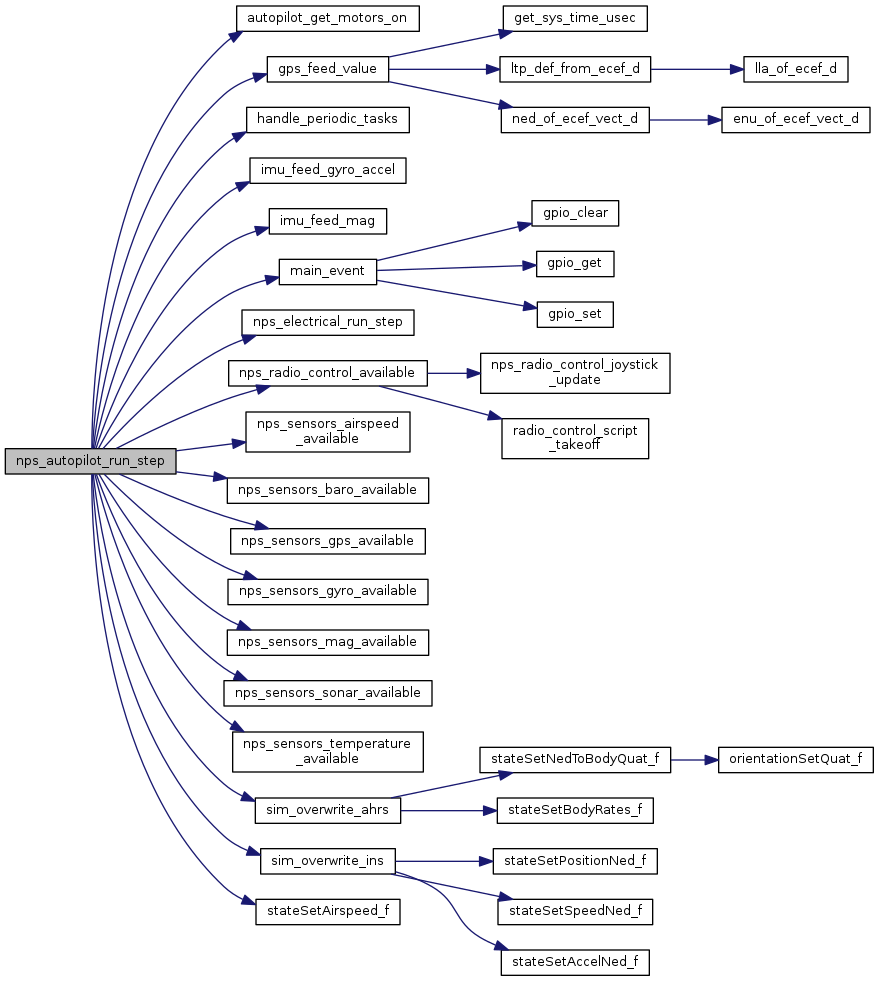
References AGL_SONAR_NPS_ID, NpsSensors::airspeed, autopilot_get_motors_on(), NpsSensors::baro, BARO_SIM_SENDER_ID, NpsAutopilot::commands, MotorMixing::commands, DefaultChannel, DefaultDevice, foo, gps_feed_value(), handle_periodic_tasks(), imu_feed_gyro_accel(), imu_feed_mag(), main_event(), MAX_PPRZ, motor_mixing, nps_autopilot, nps_bypass_ahrs, nps_bypass_ins, NPS_COMMANDS_NB, nps_electrical_run_step(), nps_radio_control_available(), nps_sensors_airspeed_available(), nps_sensors_baro_available(), nps_sensors_gps_available(), nps_sensors_gyro_available(), nps_sensors_mag_available(), nps_sensors_sonar_available(), nps_sensors_temperature_available(), sensors, sim_overwrite_ahrs(), sim_overwrite_ins(), NpsSensors::sonar, stateSetAirspeed_f(), NpsSensors::temp, NpsSensorBaro::value, NpsSensorTemperature::value, NpsSensorAirspeed::value, and NpsSensorSonar::value.
Referenced by nps_main_run_sim_step().
Here is the call graph for this function: Here is the caller graph for this function:| void nps_autopilot_run_systime_step | ( | void | ) |
Definition at line 85 of file nps_autopilot_rotorcraft.c.
References sys_tick_handler().
Referenced by nps_main_run_sim_step().
Here is the call graph for this function: Here is the caller graph for this function:| void sim_overwrite_ahrs | ( | void | ) |
Definition at line 172 of file nps_autopilot_rotorcraft.c.
References NpsFdm::body_ecef_rotvel, fdm, NpsFdm::ltp_to_body_quat, QUAT_COPY, RATES_COPY, stateSetBodyRates_f(), and stateSetNedToBodyQuat_f().
Referenced by nps_autopilot_run_step().
Here is the call graph for this function: Here is the caller graph for this function:| void sim_overwrite_ins | ( | void | ) |
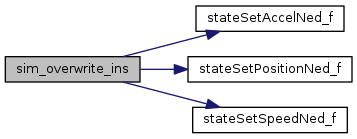
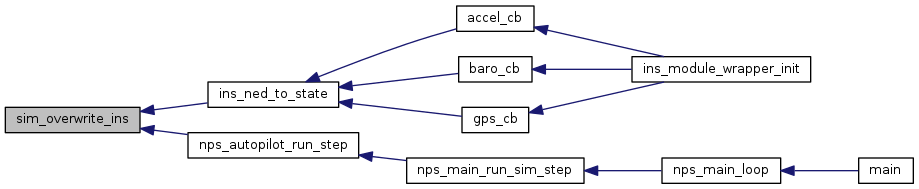
Definition at line 185 of file nps_autopilot_rotorcraft.c.
References fdm, NpsFdm::ltpprz_ecef_accel, NpsFdm::ltpprz_ecef_vel, NpsFdm::ltpprz_pos, stateSetAccelNed_f(), stateSetPositionNed_f(), stateSetSpeedNed_f(), and VECT3_COPY.
Referenced by ins_ned_to_state(), and nps_autopilot_run_step().
Here is the call graph for this function: Here is the caller graph for this function:| struct NpsAutopilot nps_autopilot |
Definition at line 55 of file nps_autopilot_rotorcraft.c.
Referenced by nps_ap_data_loop(), nps_autopilot_init(), nps_autopilot_run_step(), nps_main_run_sim_step(), and nps_update_launch_from_dl().
| bool nps_bypass_ahrs |
Definition at line 56 of file nps_autopilot_rotorcraft.c.
Referenced by nps_autopilot_init(), and nps_autopilot_run_step().
| bool nps_bypass_ins |
Definition at line 57 of file nps_autopilot_rotorcraft.c.
Referenced by ins_ned_to_state(), nps_autopilot_init(), and nps_autopilot_run_step().
 1.8.8
1.8.8