|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| void | kalman_filter_linear_2D_float (float *model, float *measurements, float *covariance, float *state, float *process_noise, float *measurement_noise) |
| A simple linear 2D kalman filter, computed using floats and matrices. More... | |
| void kalman_filter_linear_2D_float | ( | float * | model, |
| float * | measurements, | ||
| float * | covariance, | ||
| float * | state, | ||
| float * | process_noise, | ||
| float * | measurement_noise | ||
| ) |
A simple linear 2D kalman filter, computed using floats and matrices.
To be used for vision task like optical flow, tracking markers etc.
| [in] | *model | The process model for the prediction of the next state (array size of [1 x 4]) |
| [in] | *measurements | Values of the measurements (array size of [1 x 2]) |
| [in] | *covariance | Covariance matrix of previous iteration (array size of [1 x 4]) |
| [out] | *covariance | Updated Covariance matrix (array size of [1 x 4]) |
| [in] | *state | Previous state vector with estimates(array size of [1 x 2]) |
| [out] | *state | Updated state vector with estimates |
| [in] | *measurement_noise | Expected variance of the noise of the measurements |
| [in] | *process_noise | Expected variance of the noise of the process model |
Definition at line 26 of file kalman_filter_vision.c.
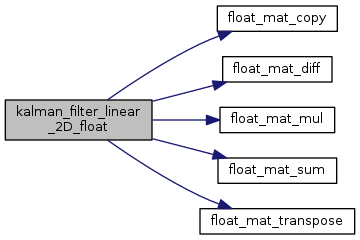
References float_mat_copy(), float_mat_diff(), float_mat_mul(), float_mat_sum(), float_mat_transpose(), H, MAKE_MATRIX_PTR, Q, and mesonh.mesonh_atmosphere::Z.
Referenced by kalman_filter_opticflow_velocity().
Here is the call graph for this function: Here is the caller graph for this function: 1.8.8
1.8.8