|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
Flight Dynamics Model (FDM) for NPS using Gazebo. More...
#include <cstdio>#include <cstdlib>#include <string>#include <iostream>#include <gazebo/gazebo.hh>#include <gazebo/common/common.hh>#include <gazebo/physics/physics.hh>#include <gazebo/sensors/sensors.hh>#include <gazebo/gazebo_config.h>#include <sys/time.h>#include "nps_fdm.h"#include "math/pprz_algebra_double.h"#include "generated/airframe.h"#include "autopilot.h" Include dependency graph for nps_fdm_gazebo.cpp:
Include dependency graph for nps_fdm_gazebo.cpp:Go to the source code of this file.
Macros | |
| #define | NPS_GAZEBO_WORLD "ardrone.world" |
| #define | NPS_GAZEBO_AC_NAME "paparazzi_uav" |
Functions | |
| static void | init_gazebo (void) |
| Set up a Gazebo server. More... | |
| static void | gazebo_read (void) |
| Read Gazebo's simulation state and store the results in the fdm struct used by NPS. More... | |
| static void | gazebo_write (double commands[], int commands_nb) |
| Write actuator commands to Gazebo. More... | |
| struct EcefCoor_d | to_pprz_ecef (ignition::math::Vector3d ecef_i) |
| struct NedCoor_d | to_pprz_ned (ignition::math::Vector3d global) |
| struct LlaCoor_d | to_pprz_lla (ignition::math::Vector3d lla_i) |
| struct DoubleVect3 | to_pprz_body (gazebo::math::Vector3 body_g) |
| struct DoubleRates | to_pprz_rates (gazebo::math::Vector3 body_g) |
| struct DoubleEulers | to_pprz_eulers (gazebo::math::Quaternion quat) |
| struct DoubleVect3 | to_pprz_ltp (gazebo::math::Vector3 xyz) |
| void | nps_fdm_init (double dt) |
| Set JSBsim specific fields that are not used for Gazebo. More... | |
| void | nps_fdm_run_step (bool launch, double *commands, int commands_nb) |
| Update the simulation state. More... | |
| void | nps_fdm_set_wind (double speed, double dir) |
| void | nps_fdm_set_wind_ned (double wind_north, double wind_east, double wind_down) |
| void | nps_fdm_set_turbulence (double wind_speed, int turbulence_severity) |
| void | nps_fdm_set_temperature (double temp, double h) |
| Set temperature in degrees Celcius at given height h above MSL. More... | |
Variables | |
| struct NpsFdm | fdm |
| Holds all necessary NPS FDM state information. More... | |
| static bool | gazebo_initialized = false |
| static gazebo::physics::ModelPtr | model = NULL |
Flight Dynamics Model (FDM) for NPS using Gazebo.
This is an FDM for NPS that uses Gazebo as the simulation engine.
Definition in file nps_fdm_gazebo.cpp.
| #define NPS_GAZEBO_AC_NAME "paparazzi_uav" |
Definition at line 68 of file nps_fdm_gazebo.cpp.
Referenced by init_gazebo().
| #define NPS_GAZEBO_WORLD "ardrone.world" |
Definition at line 65 of file nps_fdm_gazebo.cpp.
Referenced by init_gazebo().
|
static |
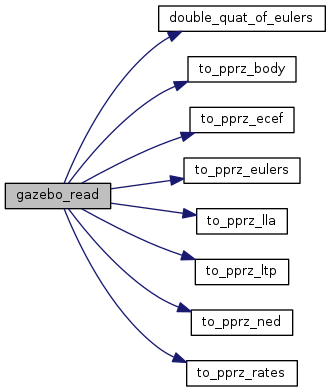
Read Gazebo's simulation state and store the results in the fdm struct used by NPS.
Not all fields are filled at the moment, as some of them are unused by paparazzi (see comments) and others are not available in Gazebo 7 (atmosphere).
Definition at line 300 of file nps_fdm_gazebo.cpp.
References NpsFdm::agl, NpsFdm::airspeed, NpsFdm::aoa, NpsFdm::body_accel, NpsFdm::body_ecef_accel, NpsFdm::body_ecef_rotvel, NpsFdm::body_ecef_vel, NpsFdm::body_inertial_accel, NpsFdm::body_inertial_rotvel, double_quat_of_eulers(), NpsFdm::dynamic_pressure, NpsFdm::ecef_ecef_accel, NpsFdm::ecef_ecef_vel, NpsFdm::ecef_pos, NpsFdm::elevator, fdm, NpsFdm::flap, NpsFdm::hmsl, NpsFdm::left_aileron, NpsFdm::lla_pos, NpsFdm::lla_pos_geoc, NpsFdm::lla_pos_geod, NpsFdm::lla_pos_pprz, NpsFdm::ltp_ecef_accel, NpsFdm::ltp_ecef_vel, NpsFdm::ltp_g, NpsFdm::ltp_h, NpsFdm::ltp_to_body_eulers, NpsFdm::ltp_to_body_quat, NpsFdm::ltpprz_ecef_accel, NpsFdm::ltpprz_ecef_vel, NpsFdm::ltpprz_pos, NpsFdm::ltpprz_to_body_eulers, NpsFdm::ltpprz_to_body_quat, model, NpsFdm::num_engines, NpsFdm::pressure, NpsFdm::pressure_sl, NpsFdm::right_aileron, NpsFdm::rudder, NpsFdm::sideslip, NpsFdm::temperature, NpsFdm::time, to_pprz_body(), to_pprz_ecef(), to_pprz_eulers(), to_pprz_lla(), to_pprz_ltp(), to_pprz_ned(), to_pprz_rates(), NpsFdm::wind, and DoubleVect3::x.
Referenced by nps_fdm_run_step().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Write actuator commands to Gazebo.
This function takes the normalized commands and applies them as forces and torques in Gazebo. Since the commands are normalized in [0,1], their thrusts (NPS_ACTUATOR_THRUSTS) and torques (NPS_ACTUATOR_TORQUES) need to be specified in the airframe file. Their values need to be specified in the same order as the NPS_ACTUATOR_NAMES and should be provided in SI units. See conf/airframes/examples/ardrone2_gazebo.xml for an example.
The forces and torques are applied to (the origin of) the links named in NPS_ACTUATOR_NAMES. See conf/simulator/gazebo/models/ardrone/ardrone.sdf for an example.
| commands | |
| commands_nb |
Definition at line 434 of file nps_fdm_gazebo.cpp.
References autopilot, model, and pprz_autopilot::motors_on.
Referenced by nps_fdm_run_step().
Here is the caller graph for this function:
|
static |
Set up a Gazebo server.
Starts a Gazebo server, adds conf/simulator/gazebo/models to its model path and loads the world specified by NPS_GAZEBO_WORLD.
This function also obtaines a pointer to the aircraft model, named NPS_GAZEBO_AC_NAME ('paparazzi_uav' by default). This pointer, 'model', is used to read the state and write actuator commands in gazebo_read and _write.
Definition at line 251 of file nps_fdm_gazebo.cpp.
References model, NPS_GAZEBO_AC_NAME, and NPS_GAZEBO_WORLD.
Referenced by nps_fdm_run_step().
Here is the caller graph for this function:| void nps_fdm_init | ( | double | dt | ) |
Set JSBsim specific fields that are not used for Gazebo.
| dt |
Definition at line 168 of file nps_fdm_gazebo.cpp.
References NpsFdm::curr_dt, fdm, NpsFdm::init_dt, and NpsFdm::nan_count.
| void nps_fdm_run_step | ( | bool | launch, |
| double * | commands, | ||
| int | commands_nb | ||
| ) |
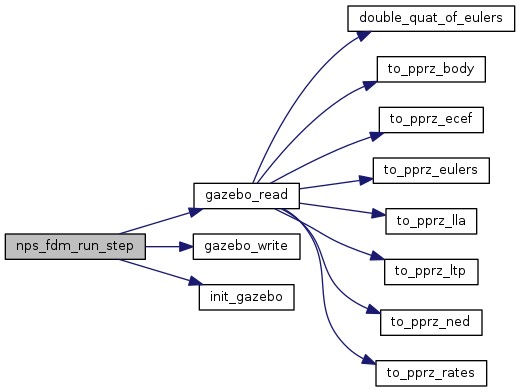
Update the simulation state.
| launch | |
| commands | |
| commands_nb |
Definition at line 181 of file nps_fdm_gazebo.cpp.
References gazebo_initialized, gazebo_read(), gazebo_write(), init_gazebo(), and model.
Here is the call graph for this function:| void nps_fdm_set_temperature | ( | double | temp, |
| double | h | ||
| ) |
Set temperature in degrees Celcius at given height h above MSL.
Definition at line 233 of file nps_fdm_gazebo.cpp.
| void nps_fdm_set_turbulence | ( | double | wind_speed, |
| int | turbulence_severity | ||
| ) |
Definition at line 226 of file nps_fdm_gazebo.cpp.
| void nps_fdm_set_wind | ( | double | speed, |
| double | dir | ||
| ) |
Definition at line 213 of file nps_fdm_gazebo.cpp.
| void nps_fdm_set_wind_ned | ( | double | wind_north, |
| double | wind_east, | ||
| double | wind_down | ||
| ) |
Definition at line 219 of file nps_fdm_gazebo.cpp.
| struct DoubleVect3 to_pprz_body | ( | gazebo::math::Vector3 | body_g | ) |
Definition at line 126 of file nps_fdm_gazebo.cpp.
References DoubleVect3::x, DoubleVect3::y, and DoubleVect3::z.
Referenced by gazebo_read().
Here is the caller graph for this function:| struct EcefCoor_d to_pprz_ecef | ( | ignition::math::Vector3d | ecef_i | ) |
Definition at line 99 of file nps_fdm_gazebo.cpp.
References EcefCoor_d::x, EcefCoor_d::y, and EcefCoor_d::z.
Referenced by gazebo_read().
Here is the caller graph for this function:| struct DoubleEulers to_pprz_eulers | ( | gazebo::math::Quaternion | quat | ) |
Definition at line 144 of file nps_fdm_gazebo.cpp.
References DoubleEulers::phi, DoubleEulers::psi, and DoubleEulers::theta.
Referenced by gazebo_read().
Here is the caller graph for this function:| struct LlaCoor_d to_pprz_lla | ( | ignition::math::Vector3d | lla_i | ) |
Definition at line 117 of file nps_fdm_gazebo.cpp.
References LlaCoor_d::alt, LlaCoor_d::lat, and LlaCoor_d::lon.
Referenced by gazebo_read().
Here is the caller graph for this function:| struct DoubleVect3 to_pprz_ltp | ( | gazebo::math::Vector3 | xyz | ) |
Definition at line 153 of file nps_fdm_gazebo.cpp.
References DoubleVect3::x, DoubleVect3::y, and DoubleVect3::z.
Referenced by gazebo_read().
Here is the caller graph for this function:| struct NedCoor_d to_pprz_ned | ( | ignition::math::Vector3d | global | ) |
Definition at line 108 of file nps_fdm_gazebo.cpp.
References NedCoor_d::x, NedCoor_d::y, and NedCoor_d::z.
Referenced by gazebo_read().
Here is the caller graph for this function:| struct DoubleRates to_pprz_rates | ( | gazebo::math::Vector3 | body_g | ) |
Definition at line 135 of file nps_fdm_gazebo.cpp.
References DoubleRates::p, DoubleRates::q, and DoubleRates::r.
Referenced by gazebo_read().
Here is the caller graph for this function:| struct NpsFdm fdm |
Holds all necessary NPS FDM state information.
Definition at line 87 of file nps_fdm_gazebo.cpp.
Referenced by gazebo_read(), and nps_fdm_init().
|
static |
Definition at line 90 of file nps_fdm_gazebo.cpp.
Referenced by nps_fdm_run_step().
|
static |
Definition at line 91 of file nps_fdm_gazebo.cpp.
Referenced by gazebo_read(), gazebo_write(), init_gazebo(), kalman_filter_opticflow_velocity(), and nps_fdm_run_step().
 1.8.8
1.8.8