|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
Xsens700 as a full INS solution. More...
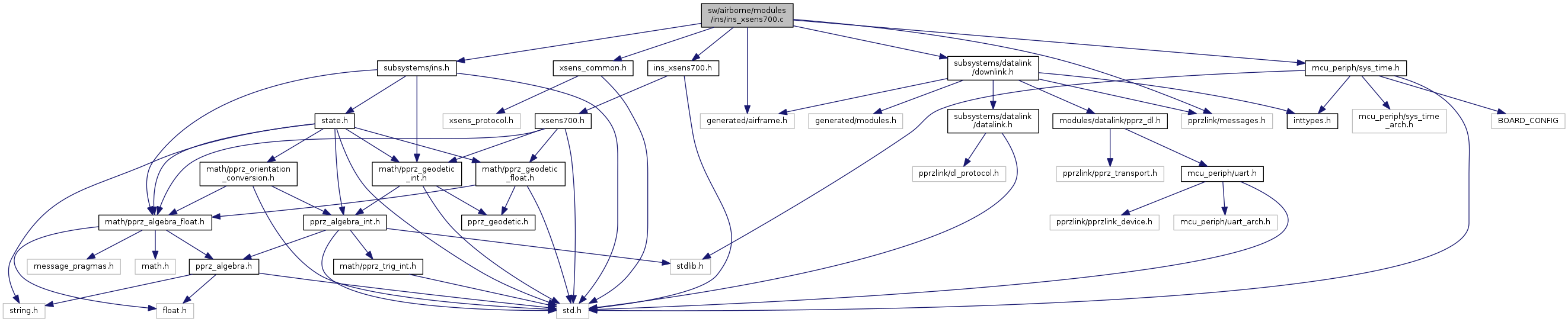
#include "ins_xsens700.h"#include "xsens_common.h"#include "subsystems/ins.h"#include "generated/airframe.h"#include "mcu_periph/sys_time.h"#include "subsystems/datalink/downlink.h"#include "pprzlink/messages.h" Include dependency graph for ins_xsens700.c:
Include dependency graph for ins_xsens700.c:Go to the source code of this file.
Macros | |
| #define | INS_XSENS700_GPS_ID GPS_MULTI_ID |
| ABI binding for gps data. More... | |
Functions | |
| static void | handle_ins_msg (void) |
| static void | update_state_interface (void) |
| static void | gps_cb (uint8_t sender_id, uint32_t stamp, struct GpsState *gps_s) |
| void | ins_xsens700_init (void) |
| void | ins_xsens700_event (void) |
Variables | |
| static abi_event | gps_ev |
| float | ins_pitch_neutral |
| float | ins_roll_neutral |
Xsens700 as a full INS solution.
Definition in file ins_xsens700.c.
| #define INS_XSENS700_GPS_ID GPS_MULTI_ID |
ABI binding for gps data.
Used for GPS ABI messages.
Definition at line 53 of file ins_xsens700.c.
Referenced by ins_xsens700_init().
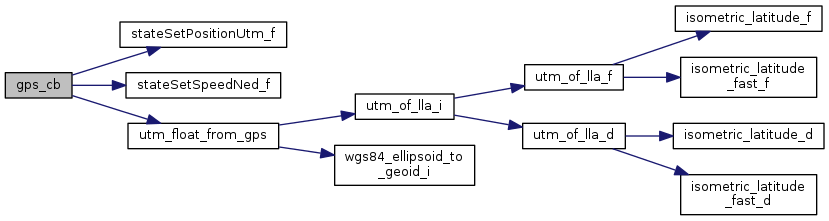
Definition at line 91 of file ins_xsens700.c.
References nav_utm_zone0, GpsState::ned_vel, stateSetPositionUtm_f(), stateSetSpeedNed_f(), utm_float_from_gps(), NedCoor_i::x, NedCoor_i::y, and NedCoor_i::z.
Referenced by ins_xsens700_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 162 of file ins_xsens700.c.
References FLOAT_VECT2_NORM, float_vect3_norm(), GPS_FIX_3D, GPS_VALID_COURSE_BIT, Xsens::new_attitude, new_ins_attitude, update_state_interface(), Xsens::vel, FloatVect3::x, xsens700, and FloatVect3::y.
Referenced by ins_xsens700_event().
Here is the call graph for this function: Here is the caller graph for this function:| void ins_xsens700_event | ( | void | ) |
Definition at line 81 of file ins_xsens700.c.
References handle_ins_msg(), Xsens::msg_received, parse_xsens700_msg(), xsens700, and xsens_event().
Here is the call graph for this function:| void ins_xsens700_init | ( | void | ) |
Definition at line 67 of file ins_xsens700.c.
References gps_cb(), INS_PITCH_NEUTRAL_DEFAULT, INS_ROLL_NEUTRAL_DEFAULT, INS_XSENS700_GPS_ID, nav_utm_east0, nav_utm_north0, nav_utm_zone0, stateSetLocalUtmOrigin_f(), stateSetPositionUtm_f(), and xsens700_init().
Here is the call graph for this function:
|
static |
Definition at line 131 of file ins_xsens700.c.
References Xsens::euler, Xsens::gyro, ins_pitch_neutral, ins_roll_neutral, FloatRates::p, FloatEulers::phi, FloatEulers::psi, FloatRates::q, FloatRates::r, stateSetBodyRates_f(), stateSetNedToBodyEulers_f(), FloatEulers::theta, and xsens700.
Referenced by handle_ins_msg().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 56 of file ins_xsens700.c.
| float ins_pitch_neutral |
Definition at line 58 of file ins_xsens700.c.
Referenced by update_state_interface().
| float ins_roll_neutral |
Definition at line 59 of file ins_xsens700.c.
Referenced by update_state_interface().
 1.8.8
1.8.8