|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
Integrated Navigation System interface. More...
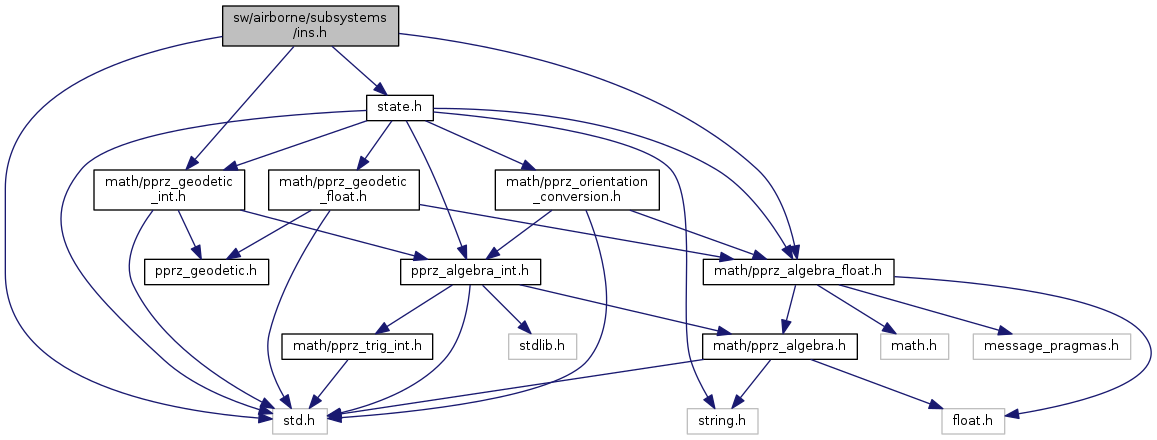
#include "std.h"#include "math/pprz_geodetic_int.h"#include "math/pprz_algebra_float.h"#include "state.h" Include dependency graph for ins.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for ins.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| void | ins_reset_local_origin (void) |
| INS local origin reset. More... | |
| void | ins_reset_altitude_ref (void) |
| INS altitude reference reset. More... | |
| void | ins_reset_utm_zone (struct UtmCoor_f *utm) |
| INS utm zone reset. More... | |
| void | ins_init_origin_i_from_flightplan (struct LtpDef_i *ltp_def) |
| initialize the local origin (ltp_def in fixed point) from flight plan position More... | |
Integrated Navigation System interface.
Definition in file ins.h.
| void ins_init_origin_i_from_flightplan | ( | struct LtpDef_i * | ltp_def | ) |
initialize the local origin (ltp_def in fixed point) from flight plan position
Definition at line 39 of file ins.c.
References LlaCoor_i::alt, LtpDef_i::hmsl, LlaCoor_i::lat, LlaCoor_i::lon, ltp_def_from_lla_i(), and stateSetLocalOrigin_i().
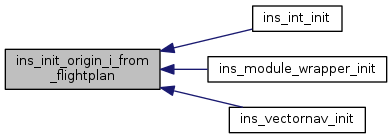
Referenced by ins_int_init(), ins_module_wrapper_init(), and ins_vectornav_init().
Here is the call graph for this function: Here is the caller graph for this function:| void ins_reset_altitude_ref | ( | void | ) |
INS altitude reference reset.
Reset only vertical reference to the current altitude. Does nothing if not implemented by specific INS algorithm.
Definition at line 153 of file ins_alt_float.c.
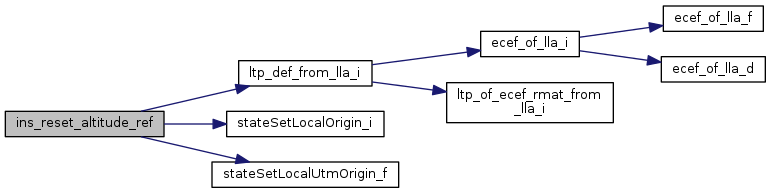
References LlaCoor_i::alt, UtmCoor_f::alt, gps, GpsState::hmsl, LtpDef_i::hmsl, ins_altf, ins_gp, ins_int, LlaCoor_i::lat, LtpDef_i::lla, GpsState::lla_pos, LlaCoor_i::lon, InsInt::ltp_def, InsGpsPassthrough::ltp_def, ltp_def_from_lla_i(), State::ned_origin_i, InsAltFloat::reset_alt_ref, state, stateSetLocalOrigin_i(), stateSetLocalUtmOrigin_f(), State::utm_origin_f, and InsInt::vf_reset.
Referenced by nav_reset_alt().
Here is the call graph for this function: Here is the caller graph for this function:| void ins_reset_local_origin | ( | void | ) |
INS local origin reset.
Reset horizontal and vertical reference to the current position. Does nothing if not implemented by specific INS algorithm.
INS local origin reset.
Definition at line 137 of file ins_skeleton.c.
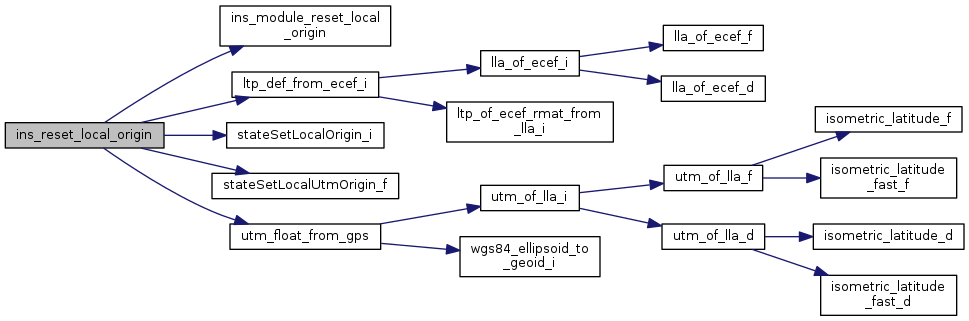
References LlaCoor_i::alt, GpsState::ecef_pos, GpsState::fix, InsModuleInt::gps, gps, GPS_FIX_3D, GpsFixValid, InsInt::hf_realign, GpsState::hmsl, LtpDef_i::hmsl, ins_altf, ins_gp, ins_int, ins_module, ins_module_reset_local_origin(), LtpDef_i::lla, GpsState::lla_pos, InsModuleInt::ltp_def, InsInt::ltp_def, InsGpsPassthrough::ltp_def, ltp_def_from_ecef_i(), InsInt::ltp_initialized, InsModuleInt::ltp_initialized, InsGpsPassthrough::ltp_initialized, InsAltFloat::origin_initialized, InsAltFloat::reset_alt_ref, stateSetLocalOrigin_i(), stateSetLocalUtmOrigin_f(), utm_float_from_gps(), and InsInt::vf_reset.
Referenced by gps_cb(), ins_alt_float_update_gps(), ins_int_update_gps(), and nav_reset_reference().
Here is the call graph for this function: Here is the caller graph for this function:| void ins_reset_utm_zone | ( | struct UtmCoor_f * | utm | ) |
INS utm zone reset.
Reset UTM zone according the the actual position. Only used with fixedwing firmware. Can be overwritte by specifc INS implementation.
| utm | initial utm zone, returns the corrected utm position |
Definition at line 68 of file ins.c.
References gps, GPS_VALID_POS_UTM_BIT, lla_of_utm_f(), stateSetLocalUtmOrigin_f(), utm_of_lla_f(), GpsState::utm_pos, GpsState::valid_fields, UtmCoor_f::zone, and UtmCoor_i::zone.
Referenced by nav_reset_utm_zone().
Here is the call graph for this function: Here is the caller graph for this function: 1.8.8
1.8.8